This is my study notes / codes along with Andrej Karpathy’s “Neural Networks: Zero to Hero” series.
Edit 1st June, 25: I changed the loop to 5k only, for the shake of time saving when re-rendering this post!
intro: why you should care

In the previous lecture, we’re introduced to some common issues with our “shallow” (and of course for deep as well) neural network and how to fix with the initialization setting and Batch Normalization. We’re also learned some diagnostic tools to observe forward pass activations, backward pass gradients, and weights update, to calibrate the training loop. In this lecture, we aim to replace this line of code:
with from-scratch-code. It’s basically identical to MicroGrad, but on Tensor rather than Scalar. But why we should care?
The problem with Backpropagation is that it is a leaky abstraction. – Andrej Karpathy
readmore: - https://karpathy.medium.com/yes-you-should-understand-backprop-e2f06eab496b, - and https://kratzert.github.io/2016/02/12/understanding-the-gradient-flow-through-the-batch-normalization-layer.html.
inshort, to effectively debug neural network, we should be deeply understanding how back propagation work under the hood. Let’s do it!
starter code
import libraries:
read data:
build vocab:
Show the code
{1: 'a', 2: 'b', 3: 'c', 4: 'd', 5: 'e', 6: 'f', 7: 'g', 8: 'h', 9: 'i', 10: 'j', 11: 'k', 12: 'l', 13: 'm', 14: 'n', 15: 'o', 16: 'p', 17: 'q', 18: 'r', 19: 's', 20: 't', 21: 'u', 22: 'v', 23: 'w', 24: 'x', 25: 'y', 26: 'z', 0: '.'}
27build dataset splits (identical to previous so I folded it):
Show the code
block_size = 3 # context length: how many characters do we take to predict the next one.
# build the dataset
def buid_dataset(words):
X, Y = [], []
for w in words:
context = [0] * block_size
for ch in w + '.':
ix = stoi[ch]
X.append(context)
Y.append(ix)
context = context[1:] + [ix]
X = torch.tensor(X)
Y = torch.tensor(Y)
print(X.shape, Y.shape)
return X, Y
import random
random.seed(42)
random.shuffle(words)
n1 = int(0.8 * len(words))
n2 = int(0.9 * len(words))
Xtr, Ytr = buid_dataset(words[:n1]) # 80#
Xdev, Ydev = buid_dataset(words[n1:n2]) # 10%
Xte, Yte = buid_dataset(words[n2:]) # 10%torch.Size([182625, 3]) torch.Size([182625])
torch.Size([22655, 3]) torch.Size([22655])
torch.Size([22866, 3]) torch.Size([22866])utility function we will use later when comparing manual gradients to PyTorch gradients.
network construction:
Show the code
n_embd = 10 # the dimensionality of the character embedding vectors
n_hidden = 64 # the number of neurons in the hidden layer of the MLP
g = torch.Generator().manual_seed(2147483647) # for reproducibility
C = torch.randn((vocab_size, n_embd), generator=g)
# Layer 1
W1 = torch.randn((n_embd * block_size, n_hidden), generator=g) * (5/3)/((n_embd * block_size)**0.5)
b1 = torch.randn(n_hidden, generator=g) * 0.1 # using b1 just for fun, it's useless because of BN
# Layer 2
W2 = torch.randn((n_hidden, vocab_size), generator=g) * 0.1
b2 = torch.randn(vocab_size, generator=g) * 0.1
# BatchNorm parameters
bngain = torch.randn((1, n_hidden))*0.1 + 1.0
bnbias = torch.randn((1, n_hidden))*0.1
# Note: I am initializating many of these parameters in non-standard ways
# because sometimes initializating with e.g. all zeros could mask an incorrect
# implementation of the backward pass.
parameters = [C, W1, b1, W2, b2, bngain, bnbias]
print(sum(p.nelement() for p in parameters)) # number of parameters in total
for p in parameters:
p.requires_grad = True4137mini-batch construction:
forward pass, “chunkated” into smaller steps that are possible to backward one at a time.
Show the code
emb = C[Xb] # embed the characters into vectors
embcat = emb.view(emb.shape[0], -1) # concatenate the vectors
# Linear layer 1
hprebn = embcat @ W1 + b1 # hidden layer pre-activation
# BatchNorm layer
bnmeani = 1/n*hprebn.sum(0, keepdim=True)
bndiff = hprebn - bnmeani
bndiff2 = bndiff**2
bnvar = 1/(n-1)*(bndiff2).sum(0, keepdim=True) # note: Bessel's correction (dividing by n-1, not n)
bnvar_inv = (bnvar + 1e-5)**-0.5
bnraw = bndiff * bnvar_inv
hpreact = bngain * bnraw + bnbias
# Non-linearity
h = torch.tanh(hpreact) # hidden layer
# Linear layer 2
logits = h @ W2 + b2 # output layer
# cross entropy loss (same as F.cross_entropy(logits, Yb)), Kullback–Leibler divergence
logit_maxes = logits.max(1, keepdim=True).values
norm_logits = logits - logit_maxes # subtract max for numerical stability
counts = norm_logits.exp()
counts_sum = counts.sum(1, keepdims=True)
counts_sum_inv = counts_sum**-1 # if I use (1.0 / counts_sum) instead then I can't get backprop to be bit exact...
probs = counts * counts_sum_inv
logprobs = probs.log()
loss = -logprobs[range(n), Yb].mean()
# PyTorch backward pass
for p in parameters:
p.grad = None
for t in [logprobs, probs, counts, counts_sum, counts_sum_inv, # afaik there is no cleaner way
norm_logits, logit_maxes, logits, h, hpreact, bnraw,
bnvar_inv, bnvar, bndiff2, bndiff, hprebn, bnmeani,
embcat, emb]:
t.retain_grad()
hprebn.retain_grad() # Tuan added this line since code above does not ensure hprebn's grad to be retained.
loss.backward()
losstensor(3.3424, grad_fn=<NegBackward0>)exercise 1: backproping the atomic compute graph
I can do 60, 70% of this myself ~ for popular mathematics operations. What I need to remember after these excercises are backwards of:
- elements in matrix mult;
- max operator;
- indexing operator; and
- broadcasting behavior.
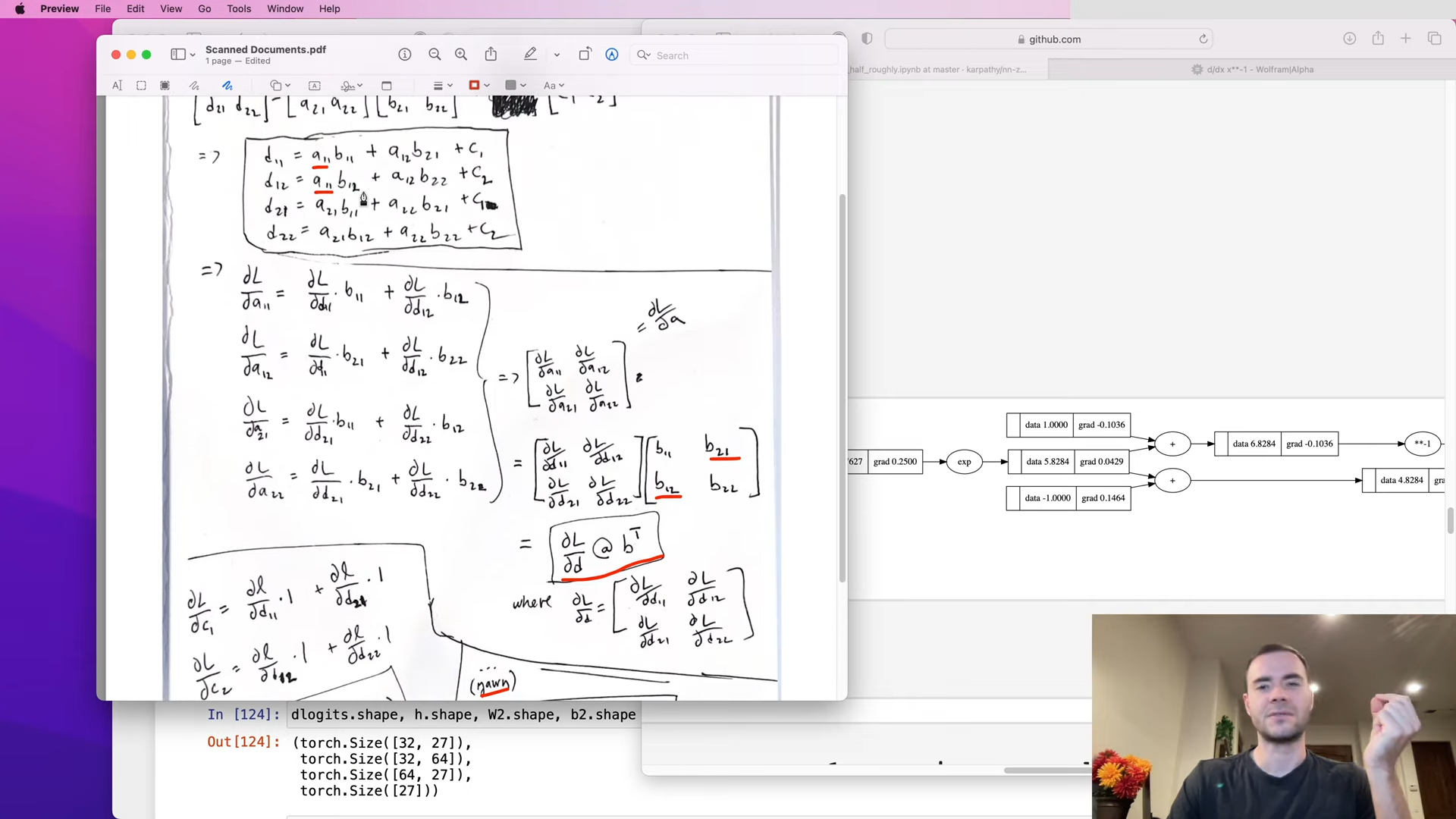
Given the matrix mult expression \(d = a @ b + c\), we have:
- \(\frac{\partial L}{\partial \mathbf{a}} = \frac{\partial L}{\partial \mathbf{d}} @ \mathbf{b}^T\)
- \(\frac{\partial L}{\partial \mathbf{b}} = \mathbf{a}^T @ \frac{\partial L}{\partial \mathbf{d}}\)
- \(\frac{\partial L}{\partial \mathbf{c}} = \frac{\partial L}{\partial \mathbf{d}}.sum(0)\)
Show the code
# Exercise 1: backprop through the whole thing manually,
# backpropagating through exactly all of the variables
# as they are defined in the forward pass above, one by one
print("Cross entropy loss".upper())
dlogprobs = torch.zeros_like(logprobs) # create zeros tensor with same size
dlogprobs[range(n), Yb] = - 1.0 / n
dprobs = torch.zeros_like(probs)
dprobs = (1.0 / probs) * dlogprobs
dcounts_sum_inv = (counts * dprobs).sum(1, keepdim=True)
dcounts_sum = (-1 * counts_sum**-2) * dcounts_sum_inv
dcounts = torch.ones_like(counts) * dcounts_sum + counts_sum_inv * dprobs
dnorm_logits = (norm_logits.exp()) * dcounts # = counts * dcounts
dlogit_maxes = (- dnorm_logits).sum(1, keepdim=True) # broadcasting, again
cmp('logprobs', dlogprobs, logprobs)
cmp('probs', dprobs, probs)
cmp('counts_sum_inv', dcounts_sum_inv, counts_sum_inv)
cmp('counts_sum', dcounts_sum, counts_sum)
cmp('counts', dcounts, counts)
cmp('norm_logits', dnorm_logits, norm_logits)
cmp('logit_maxes', dlogit_maxes, logit_maxes)
dlogits = (dnorm_logits.clone()
+ F.one_hot( logits.max(1).indices, # broadcasting, again
num_classes=logits.shape[1]
) * dlogit_maxes)
print("Layer 2 with Linear and Non-linearity tanh".upper())
dh = dlogits @ W2.T
dW2 = h.T @ dlogits
db2 = dlogits.sum(0) # sum by column, vertical, to eliminate the 0-index dim
cmp('logits', dlogits, logits)
cmp('h', dh, h)
cmp('W2', dW2, W2)
cmp('b2', db2, b2)
print("Batch Norm layer".upper())
dhpreact = (1 - h**2) * dh # output of the tanh, square
dbngain = (bnraw * dhpreact).sum(0, keepdim=True)
dbnbias = dhpreact.sum(0, keepdim=True)
dbnraw = bngain * dhpreact
dbnvar_inv = (bndiff * dbnraw).sum(0, keepdim=True)
dbnvar = (-0.5 * (bnvar + 1e-5)**-1.5) * dbnvar_inv
dbndiff2 = 1/(n-1) * torch.ones_like(bndiff2) * dbnvar
dbndiff = bnvar_inv * dbnraw + 2 * bndiff * dbndiff2
dbnmeani = (- torch.ones_like(dbndiff) * dbndiff).sum(0)
cmp('hpreact', dhpreact, hpreact)
cmp('bngain', dbngain, bngain)
cmp('bnbias', dbnbias, bnbias)
cmp('bnraw', dbnraw, bnraw)
cmp('bnvar_inv', dbnvar_inv, bnvar_inv)
cmp('bnvar', dbnvar, bnvar)
cmp('bndiff2', dbndiff2, bndiff2)
cmp('bndiff', dbndiff, bndiff)
cmp('bnmeani', dbnmeani, bnmeani)
print("Linear layer 1".upper())
dhprebn = dbndiff.clone() + (1.0/n * (torch.ones_like(hprebn) * dbnmeani))
dembcat = dhprebn @ W1.T
dW1 = embcat.T @ dhprebn
db1 = dhprebn.sum(0, keepdim=True)
demb = dembcat.view(emb.shape)
dC = torch.zeros_like(C)
for k in range(Xb.shape[0]): # iterate all elements of the Xb
for j in range(Xb.shape[1]):
ix = Xb[k,j]
dC[ix] += demb[k,j]
# Method 2
dC = torch.zeros_like(C)
dC.index_add_(0, Xb.view(-1), demb.view(-1, 10))
cmp('hprebn', dhprebn, hprebn)
cmp('embcat', dembcat, embcat)
cmp('W1', dW1, W1)
cmp('b1', db1, b1)
cmp('emb', demb, emb)
cmp('C', dC, C)- 1
-
dlogprobs:logprobsis an (32, 27) array - contains log probabilities of every character in 27 vocab for 32 output.lossjust indexes ((range(n), Yb)) to pick out the corresponding numbers of the ground trues, then do mean (1 / n) and get negative (-). So the grad for each element that had been picked out is-1/n, while for others is0; - 2
-
dprobs: d/dx log(x) is just1/x- local derivative, then multiply by next leaf graddlogprobs, element wise; - 3
-
dcounts_sum_inv: should becounts * dprobsaccording to chainrule. But remembercounts.shapeis (32, 27), andcounts_sum_inv.shapeis (32, 1), then there is broadcasting to 27 columns.counts_sum_invis being used multiple times in the topo/diagram -> we need to sum them (grad) up. We do it by columns soKeepdim=True; - 4
-
dcount: was used in 2 expression, so it would be the sum of (1)counts_sum_inv * dprobs- same withdcounts_sum_invby symmetry, and (2)torch.ones_like(counts) * dcounts_sum- the gradient flow fromdcounts_sumequally, and equal to1; - 5
-
dlogits: sum of 2 flows, the 2nd one formax()operations -> gradient should be the1for those max elements, the remain would be0; - 6
-
Notice the vertical broadcasting of
bngainandbnbias; - 7
-
Need to sum up vertically because
bnvar_invis (1, 64) while 2 multipliers are (32, 64); - 8
- Undo the concatenation;
- 9
-
Undo the indexing:
emb.shape = (32, 3, 10),C.shape = (27, 10),Xb.shape = (32, 3).
CROSS ENTROPY LOSS
logprobs | exact: True | approximate: True | maxdiff: 0.0
probs | exact: True | approximate: True | maxdiff: 0.0
counts_sum_inv | exact: True | approximate: True | maxdiff: 0.0
counts_sum | exact: True | approximate: True | maxdiff: 0.0
counts | exact: True | approximate: True | maxdiff: 0.0
norm_logits | exact: True | approximate: True | maxdiff: 0.0
logit_maxes | exact: True | approximate: True | maxdiff: 0.0
LAYER 2 WITH LINEAR AND NON-LINEARITY TANH
logits | exact: True | approximate: True | maxdiff: 0.0
h | exact: True | approximate: True | maxdiff: 0.0
W2 | exact: True | approximate: True | maxdiff: 0.0
b2 | exact: True | approximate: True | maxdiff: 0.0
BATCH NORM LAYER
hpreact | exact: True | approximate: True | maxdiff: 0.0
bngain | exact: True | approximate: True | maxdiff: 0.0
bnbias | exact: True | approximate: True | maxdiff: 0.0
bnraw | exact: True | approximate: True | maxdiff: 0.0
bnvar_inv | exact: True | approximate: True | maxdiff: 0.0
bnvar | exact: True | approximate: True | maxdiff: 0.0
bndiff2 | exact: True | approximate: True | maxdiff: 0.0
bndiff | exact: True | approximate: True | maxdiff: 0.0
bnmeani | exact: True | approximate: True | maxdiff: 0.0
LINEAR LAYER 1
hprebn | exact: True | approximate: True | maxdiff: 0.0
embcat | exact: True | approximate: True | maxdiff: 0.0
W1 | exact: True | approximate: True | maxdiff: 0.0
b1 | exact: True | approximate: True | maxdiff: 0.0
emb | exact: True | approximate: True | maxdiff: 0.0
C | exact: True | approximate: True | maxdiff: 0.0brief digression: bessel’s correction in batchnorm
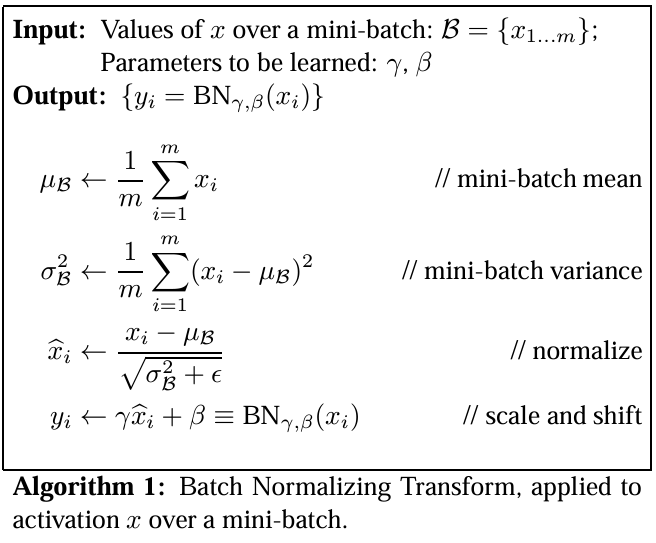
The paper of Batch Norm inconsistantly mentioned that:
- they used biased variance for training;
- and used un-biased variance for inference.
We train on small mini-batch, so should be using un-biased variance. PyTorch, since implemented what exactly paper wrote, has this discrepancy.
exercise 2: cross entropy loss backward pass
We are realizing that we doing too much work since we need to break the loss calculation from logits into too many steps that (1) they are easy enough for us to do backpropagation, but (2) most of them can cancel each other out. So in exercise two, we need to convert those bunch of atomic pieces of calculation to a shorter formula of cross entropy that can facilitate the backpropating.
Show the code
# Exercise 2: backprop through cross_entropy but all in one go
# to complete this challenge look at the mathematical expression of the loss,
# take the derivative, simplify the expression, and just write it out
# forward pass
# before:
# logit_maxes = logits.max(1, keepdim=True).values
# norm_logits = logits - logit_maxes # subtract max for numerical stability
# counts = norm_logits.exp()
# counts_sum = counts.sum(1, keepdims=True)
# counts_sum_inv = counts_sum**-1 # if I use (1.0 / counts_sum) instead then I can't get backprop to be bit exact...
# probs = counts * counts_sum_inv
# logprobs = probs.log()
# loss = -logprobs[range(n), Yb].mean()
# now:
loss_fast = F.cross_entropy(logits, Yb)
print(loss_fast.item(), 'diff:', (loss_fast - loss).item())3.3424184322357178 diff: 0.0Mathematically given the Cross-Entropy loss formula:
\(L = -\frac{1}{n} \sum_{i=1}^{n} \sum_{j=1}^{k} Y_{ij} \log(\hat{Y}_{ij})\)
with \(\hat{Y}{ij}\) is calculated by the softmax transformation:
\(\hat{Y}{ij} = \frac{\exp(\text{logits}{ij})}{\sum_{c=1}^{k} \exp(\text{logits}_{ic})}\)
where:
- \(n\): batch size, in this case is 32 -
n; - \(k\): vocab size or number of classes, in this case is 27 -
vocab_size; - \(Y \in {0,1}^{n \times k}\): one-hot encoding maxtrix (ground truth) -
Y; - \(\text{logits} \in \mathbb{R}^{n \times k}\): raw logits, input of softmax layer -
logits; - \(\hat{Y} \in [0,1]^{n \times k}\): probabilities after softmax layer -
probs.
I actually can not do this exercise so AK’s solution here:
Show the code
logits | exact: False | approximate: True | maxdiff: 5.122274160385132e-09I will comeback with another post on thisss: the backward for cross entropy loss.
what is dlogits intuitively?
Now let’s look how dlogits look like.
This is the first row of logits through softmax layer, it’s probabilities of every possible character in vocab size 27, they are all small and sum of them is 1.
tensor([0.0697, 0.0906, 0.0174, 0.0502, 0.0191, 0.0870, 0.0249, 0.0353, 0.0180,
0.0324, 0.0344, 0.0388, 0.0368, 0.0274, 0.0311, 0.0135, 0.0091, 0.0183,
0.0166, 0.0539, 0.0503, 0.0199, 0.0247, 0.0729, 0.0634, 0.0246, 0.0198],
grad_fn=<SelectBackward0>)And this is the first row of dlogits multiplied by n for comparision, it’s all identical excep the 8th probability (Xb[0] = 8). And sum of them is 0!
tensor([ 0.0697, 0.0906, 0.0174, 0.0502, 0.0191, 0.0870, 0.0249, 0.0353,
-0.9820, 0.0324, 0.0344, 0.0388, 0.0368, 0.0274, 0.0311, 0.0135,
0.0091, 0.0183, 0.0166, 0.0539, 0.0503, 0.0199, 0.0247, 0.0729,
0.0634, 0.0246, 0.0198], grad_fn=<MulBackward0>)So for each data point in the batch of 32, we pushnish super hard the correct character, making the magnitude of it’s grad is so high (negative number), then the prob of that predict-character can change toward to correct one. This push and pull is somehow the way that network learn.
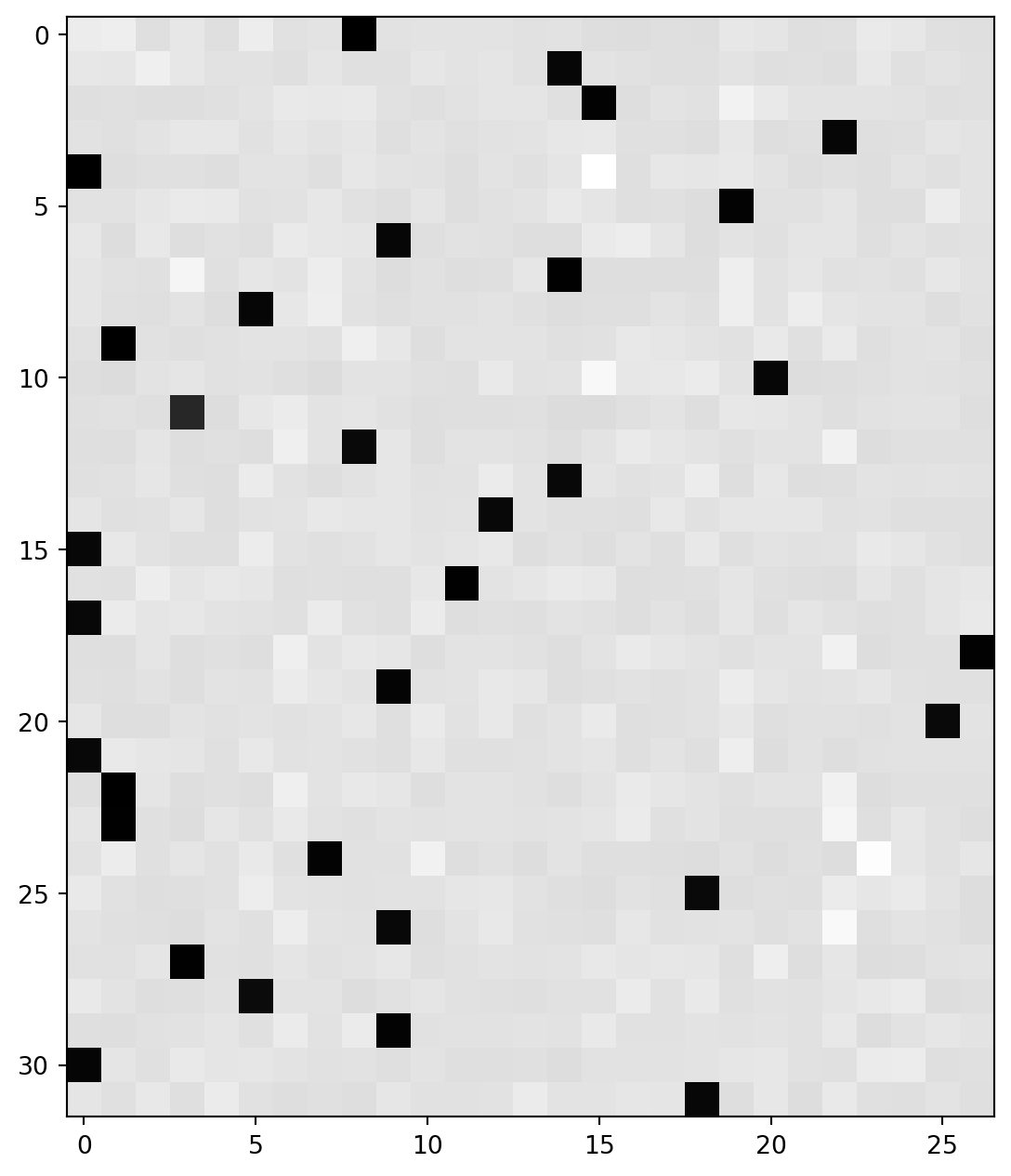
When the network perfectly predict, softmax will have a full row vector except the 8th prob, which is 1. Then the dlogits will be full of 0, the network stop learning.
exercise 3: batch norm layer backward pass
Show the code
# Exercise 3: backprop through batchnorm but all in one go
# to complete this challenge look at the mathematical expression of the output of batchnorm,
# take the derivative w.r.t. its input, simplify the expression, and just write it out
# forward pass
# before:
# bnmeani = 1/n*hprebn.sum(0, keepdim=True)
# bndiff = hprebn - bnmeani
# bndiff2 = bndiff**2
# bnvar = 1/(n-1)*(bndiff2).sum(0, keepdim=True) # note: Bessel's correction (dividing by n-1, not n)
# bnvar_inv = (bnvar + 1e-5)**-0.5
# bnraw = bndiff * bnvar_inv
# hpreact = bngain * bnraw + bnbias
# now:
hpreact_fast = bngain * (hprebn - hprebn.mean(0, keepdim=True)) / torch.sqrt(hprebn.var(0, keepdim=True, unbiased=True) + 1e-5) + bnbias
print('max diff:', (hpreact_fast - hpreact).abs().max())max diff: tensor(4.7684e-07, grad_fn=<MaxBackward1>)Below is the image of Batch Norm algorithm:
And this is flowchart
flowchart LR
Input(...) --> X(x)
X(x) -- "(4) dL/dx" --> Mu(mu)
X(x) -- "(4) dL/dx" --> Si("sigma (square)")
X(x) -- "(4) dL/dx" --> Xh(x_hat)
Si("sigma (square)") -- "(2) dL/dsigma" --> Xh(x_hat)
Mu(mu) -- "(3.1) dL/dmu" --> Xh(x_hat)
Mu(mu) -- "(3.2) dL/dmu" --> Si("sigma (square)")
Xh(x_hat) -- "(1) dL/dx_hat" --> Y(y)
G(gamma) --> Y(y)
B(beta) --> Y(y)
We will need to calculate dL/dx given dL/dy, we will calculate by hand reversely:
- scale and shift:
dL/dx_hat = gamma * dL/dyeasy enough; - normalize:
dL/dsigma = -1/2 * gamma * SUM[dL/dy * (x - mu) * (sigma^2 + eps)^(-3/2)]; - normalize & mini-batch variance:
dL/dmu = - SUM[dL/dy * gamma * (sigma^2 + eps)^(-1/2)], this is path (3.1), we can prove that path (3.2) equal to zero - sincemuis average ofx, we can think of change inmuwill be eliminated byxitself w.r.t.L; - given all the gradients above, we just write the expressions down and do some transformation, this is the final:
dL/dx = gamma * (sigma^2 + eps)^(-1/2) / m { [m * dL/dy] - SUMj[dL/dy] - m/(m-1) * x_hat * SUMj[dL/dy * x_hat]}, wheremis mini-batch size (in our data isn)
Show the code
# backward pass
# before we had:
# dbnraw = bngain * dhpreact
# dbndiff = bnvar_inv * dbnraw
# dbnvar_inv = (bndiff * dbnraw).sum(0, keepdim=True)
# dbnvar = (-0.5*(bnvar + 1e-5)**-1.5) * dbnvar_inv
# dbndiff2 = (1.0/(n-1))*torch.ones_like(bndiff2) * dbnvar
# dbndiff += (2*bndiff) * dbndiff2
# dhprebn = dbndiff.clone()
# dbnmeani = (-dbndiff).sum(0)
# dhprebn += 1.0/n * (torch.ones_like(hprebn) * dbnmeani)
# calculate dhprebn given dhpreact (i.e. backprop through the batchnorm)
# (you'll also need to use some of the variables from the forward pass up above)
dhprebn = bngain * bnvar_inv / n * ( n * dhpreact - dhpreact.sum(0) - n / (n-1) * bnraw * (dhpreact * bnraw).sum(0))
cmp('hprebn', dhprebn, hprebn) # I can only get approximate to be true, my maxdiff is 9e-10hprebn | exact: False | approximate: True | maxdiff: 9.313225746154785e-10exercise 4: putting it all together
Show the code
# Exercise 4: putting it all together!
# Train the MLP neural net with your own backward pass
# init
n_embd = 10 # the dimensionality of the character embedding vectors
n_hidden = 200 # the number of neurons in the hidden layer of the MLP
g = torch.Generator().manual_seed(2147483647) # for reproducibility
C = torch.randn((vocab_size, n_embd), generator=g)
# Layer 1
W1 = torch.randn((n_embd * block_size, n_hidden), generator=g) * (5/3)/((n_embd * block_size)**0.5)
b1 = torch.randn(n_hidden, generator=g) * 0.1
# Layer 2
W2 = torch.randn((n_hidden, vocab_size), generator=g) * 0.1
b2 = torch.randn(vocab_size, generator=g) * 0.1
# BatchNorm parameters
bngain = torch.randn((1, n_hidden))*0.1 + 1.0
bnbias = torch.randn((1, n_hidden))*0.1
parameters = [C, W1, b1, W2, b2, bngain, bnbias]
print(sum(p.nelement() for p in parameters)) # number of parameters in total
for p in parameters:
p.requires_grad = True
# same optimization as last time
max_steps = 5_000 #200_000
batch_size = 32
n = batch_size # convenience
lossi = []
# use this context manager for efficiency once your backward pass is written (TODO)
with torch.no_grad():
# kick off optimization
for i in range(max_steps):
# minibatch construct
ix = torch.randint(0, Xtr.shape[0], (batch_size,), generator=g)
Xb, Yb = Xtr[ix], Ytr[ix] # batch X,Y
# forward pass
emb = C[Xb] # embed the characters into vectors
embcat = emb.view(emb.shape[0], -1) # concatenate the vectors
# Linear layer
hprebn = embcat @ W1 + b1 # hidden layer pre-activation
# BatchNorm layer
# -------------------------------------------------------------
bnmean = hprebn.mean(0, keepdim=True)
bnvar = hprebn.var(0, keepdim=True, unbiased=True)
bnvar_inv = (bnvar + 1e-5)**-0.5
bnraw = (hprebn - bnmean) * bnvar_inv
hpreact = bngain * bnraw + bnbias
# -------------------------------------------------------------
# Non-linearity
h = torch.tanh(hpreact) # hidden layer
logits = h @ W2 + b2 # output layer
loss = F.cross_entropy(logits, Yb) # loss function
# backward pass
for p in parameters:
p.grad = None
# loss.backward() # use this for correctness comparisons, delete it later!
# manual backprop! #swole_doge_meme
# -----------------
dlogits = F.softmax(logits, 1)
dlogits[range(n), Yb] -= 1
dlogits /= n
# 2nd layer backprop
dh = dlogits @ W2.T
dW2 = h.T @ dlogits
db2 = dlogits.sum(0)
# tanh
dhpreact = (1.0 - h**2) * dh
# batchnorm backprop
dbngain = (bnraw * dhpreact).sum(0, keepdim=True)
dbnbias = dhpreact.sum(0, keepdim=True)
dhprebn = bngain*bnvar_inv/n * (n*dhpreact - dhpreact.sum(0) - n/(n-1)*bnraw*(dhpreact*bnraw).sum(0))
# 1st layer
dembcat = dhprebn @ W1.T
dW1 = embcat.T @ dhprebn
db1 = dhprebn.sum(0)
# embedding
demb = dembcat.view(emb.shape)
dC = torch.zeros_like(C)
for k in range(Xb.shape[0]):
for j in range(Xb.shape[1]):
ix = Xb[k,j]
dC[ix] += demb[k,j]
grads = [dC, dW1, db1, dW2, db2, dbngain, dbnbias]
# -----------------
# update
lr = 0.1 if i < 100000 else 0.01 # step learning rate decay
for p, grad in zip(parameters, grads):
#p.data += -lr * p.grad # old way of cheems doge (using PyTorch grad from .backward())
p.data += -lr * grad # new way of swole doge TODO: enable
# track stats
if i % 10000 == 0: # print every once in a while
print(f'{i:7d}/{max_steps:7d}: {loss.item():.4f}')
lossi.append(loss.log10().item())
# if i >= 100: # TODO: delete early breaking when you're ready to train the full net
# break12297
0/ 5000: 3.7937We can check gradients using this:
Calibrate the batch norm at the end of training:
Evaluate train and val loss:
Show the code
@torch.no_grad() # this decorator disables gradient tracking
def split_loss(split):
x,y = {
'train': (Xtr, Ytr),
'val': (Xdev, Ydev),
'test': (Xte, Yte),
}[split]
emb = C[x] # (N, block_size, n_embd)
embcat = emb.view(emb.shape[0], -1) # concat into (N, block_size * n_embd)
hpreact = embcat @ W1 + b1
hpreact = bngain * (hpreact - bnmean) * (bnvar + 1e-5)**-0.5 + bnbias
h = torch.tanh(hpreact) # (N, n_hidden)
logits = h @ W2 + b2 # (N, vocab_size)
loss = F.cross_entropy(logits, y)
print(split, loss.item())
split_loss('train')
split_loss('val')train 2.3197696208953857
val 2.3234214782714844Similar to what we achieved before!
Sample from model:
Show the code
# sample from the model
g = torch.Generator().manual_seed(2147483647 + 10)
for _ in range(20):
out = []
context = [0] * block_size # initialize with all ...
while True:
# ------------
# forward pass:
# Embedding
emb = C[torch.tensor([context])] # (1,block_size,d)
embcat = emb.view(emb.shape[0], -1) # concat into (N, block_size * n_embd)
hpreact = embcat @ W1 + b1
hpreact = bngain * (hpreact - bnmean) * (bnvar + 1e-5)**-0.5 + bnbias
h = torch.tanh(hpreact) # (N, n_hidden)
logits = h @ W2 + b2 # (N, vocab_size)
# ------------
# Sample
probs = F.softmax(logits, dim=1)
ix = torch.multinomial(probs, num_samples=1, generator=g).item()
context = context[1:] + [ix]
out.append(ix)
if ix == 0:
break
print(''.join(itos[i] for i in out))mriahamyanniee.
mad.
ryah.
remmrettadrlen.
adee.
dielin.
sha.
jen.
eden.
kananaraelle.
malara.
nosadbergihahie.
tyn.
jowelle.
jobeulanu.
zayvda.
kylene.
eha.
kayshastonah.
halina.outro
We have gone through and learned how can we manually do the gradients in our networks, it’s just some line of code for each step and pretty simple (but not for the Batch Norm formula 😪). And I’ll also be back with another post to calculate how the grad of cross entropy is coming.
In next lesson we will build RNN, LSTM, GRU, etc. Interesting and happly leanring!