This is my study notes / codes along with Andrej Karpathy’s “Neural Networks: Zero to Hero” series.
Edit 1st June, 25: I changed the loop to 5k only, for the shake of time saving when re-rendering this post!
We want to stay a bit longer with the MLPs, to have more concrete intuitive of the activations in the neural nets and gradients that flowing backwards. It’s good to learn about the development history of these architectures. Since Recurrent Neural Network (RNN), they are although very expressive but not easily optimizable with current gradient techniques we have so far. Let’s get started!
Part 1: intro
starter code
Show the code
['emma', 'olivia', 'ava', 'isabella', 'sophia', 'charlotte', 'mia', 'amelia']Show the code
{1: 'a', 2: 'b', 3: 'c', 4: 'd', 5: 'e', 6: 'f', 7: 'g', 8: 'h', 9: 'i', 10: 'j', 11: 'k', 12: 'l', 13: 'm', 14: 'n', 15: 'o', 16: 'p', 17: 'q', 18: 'r', 19: 's', 20: 't', 21: 'u', 22: 'v', 23: 'w', 24: 'x', 25: 'y', 26: 'z', 0: '.'}
27Show the code
block_size = 3
# build the dataset
def buid_dataset(words):
X, Y = [], []
for w in words:
context = [0] * block_size
for ch in w + '.':
ix = stoi[ch]
X.append(context)
Y.append(ix)
context = context[1:] + [ix]
X = torch.tensor(X)
Y = torch.tensor(Y)
print(X.shape, Y.shape)
return X, Y
import random
random.seed(42)
random.shuffle(words)
n1 = int(0.8 * len(words))
n2 = int(0.9 * len(words))
Xtr, Ytr = buid_dataset(words[:n1]) # 80#
Xdev, Ydev = buid_dataset(words[n1:n2]) # 10%
Xte, Yte = buid_dataset(words[n2:]) # 10%torch.Size([182625, 3]) torch.Size([182625])
torch.Size([22655, 3]) torch.Size([22655])
torch.Size([22866, 3]) torch.Size([22866])Show the code
# MLP revisited
n_emb = 10 # no of dimensions of the embedding space.
n_hidden = 200 # size of the hidden - tanh layer
# Lookup table - 10 dimensional space
g = torch.Generator().manual_seed(2147483647) # for reproductivity
C = torch.randn((vocab_size, n_emb), generator=g)
# Layer 1 - tanh - 300 neurons
W1 = torch.randn((block_size * n_emb, n_hidden), generator=g)
b1 = torch.randn(n_hidden, generator=g)
# Layer 2 - softmax
W2 = torch.randn((n_hidden, vocab_size), generator=g)
b2 = torch.randn(vocab_size, generator=g)
# All params
parameters = [C, W1, b1, W2, b2]
print("No of params: ", sum(p.nelement() for p in parameters))
# Pre-training
for p in parameters:
p.requires_grad = TrueNo of params: 11897Show the code
# Optimization
max_steps = 5_000 #50_000 #200_000
batch_size = 32
# Stats holders
lossi = []
# Training on Xtr, Ytr
for i in range(max_steps):
# minibatch construct
ix = torch.randint(0, Xtr.shape[0], (batch_size,))
Xb, Yb = Xtr[ix], Ytr[ix] # batch X, Y
# forward pass:
emb = C[Xb] # embed the characters into vectors
emb_cat = emb.view(emb.shape[0], -1) # concatenate the vectors
h_pre_act = emb_cat @ W1 + b1 # hidden layer pre-activation
h = torch.tanh(h_pre_act) # hidden layer
logits = h @ W2 + b2 # output layer
loss = F.cross_entropy(logits, Yb) # loss function
# backward pass:
for p in parameters:
p.grad = None
loss.backward()
# update
lr = 0.1 if i <= max_steps / 2 else 0.01 # step learning rate decay
for p in parameters:
p.data += - lr * p.grad
# track stats
if i % 10000 == 0: # print once every while
print(f'{i:7d}/{max_steps:7d}: {loss.item():.4f}')
lossi.append(loss.log10().item()) 0/ 5000: 28.0078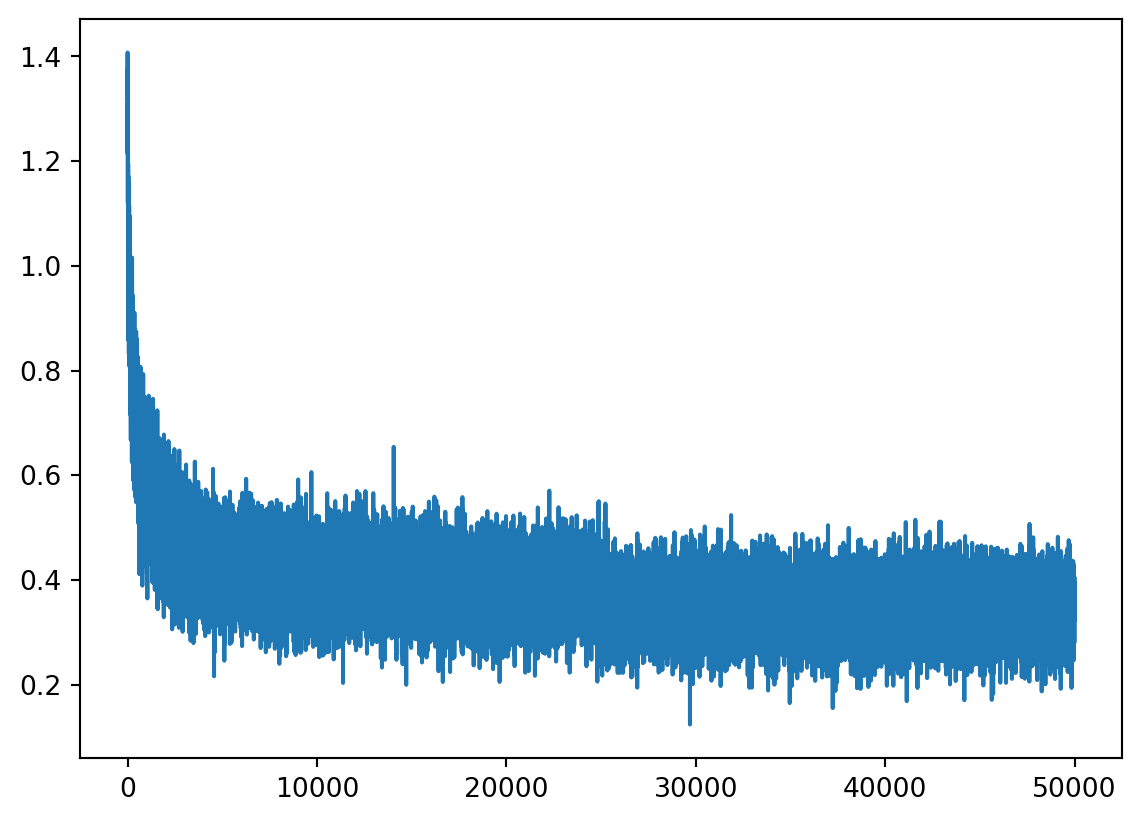
Show the code
@torch.no_grad() # disables gradient tracking
def split_loss(split: str):
x, y = {
'train': (Xtr, Ytr),
'val': (Xdev, Ydev),
'test': (Xte, Yte)
}[split]
emb = C[x] # (N, block_size, n_emb)
emb_cat = emb.view(emb.shape[0], -1) # concatenate into (N, block_size * n_emb)
h = torch.tanh(emb_cat @ W1 + b1) # (N, n_hidden)
logits = h @ W2 + b2 # (N, vocab_size)
loss = F.cross_entropy(logits, y) # loss function
print(split, loss.item())
split_loss('train')
split_loss('val')train 2.5229973793029785
val 2.531994104385376Show the code
# sample from the model
g = torch.Generator().manual_seed(2147483647 + 10)
for _ in range(20):
out = []
context = [0] * block_size # initialize with all ...
while True:
# forward pass the neural net
emb = C[torch.tensor([context])] # (1,block_size,n_embd)
h = torch.tanh(emb.view(1, -1) @ W1 + b1)
logits = h @ W2 + b2
probs = F.softmax(logits, dim=1)
# sample from the distribution
ix = torch.multinomial(probs, num_samples=1, generator=g).item()
# shift the context window and track the samples
context = context[1:] + [ix]
out.append(ix)
# if we sample the special '.' token, break
if ix == 0:
break
print(''.join(itos[i] for i in out)) # decode and print the generated wordmria.
kmyanleee.
med.
rylle.
etmanieng.
leg.
adeer.
selii.
smi.
jenledeisesnanar.
kayeimlonaa.
nosadhergahiries.
kinde.
jeliranteudanu.
zennda.
kymani.
ehs.
kayjahsyn.
daihya.
sakyansun.Okay so now our network has multiple things wrong at the initialization, let’s list down below. The final code will be presented in the end of part 1, with # 👈 for lines that had been added / modified. The right code cell below re-initializes states at the beginning of network’s parameter (in my notebook, it’s rendered linearly!).
Show the code
n_emb = 10 # no of dimensions of the embedding space.
n_hidden = 200 # size of the hidden - tanh layer
# Lookup table - 10 dimensional space
g = torch.Generator().manual_seed(2147483647) # for reproductivity
C = torch.randn((vocab_size, n_emb), generator=g)
# Layer 1 - tanh - 300 neurons
W1 = torch.randn((block_size * n_emb, n_hidden), generator=g)
b1 = torch.randn(n_hidden, generator=g)
# Layer 2 - softmax
W2 = torch.randn((n_hidden, vocab_size), generator=g)
b2 = torch.randn(vocab_size, generator=g)
# All params
parameters = [C, W1, b1, W2, b2]
# Pre-training
for p in parameters:
p.requires_grad = True
# Optimization
max_steps = 5_000 #50_000 #200_000
batch_size = 32
# Training on Xtr, Ytr
for i in range(max_steps):
# minibatch construct
ix = torch.randint(0, Xtr.shape[0], (batch_size,))
Xb, Yb = Xtr[ix], Ytr[ix] # batch X, Y
# forward pass:
emb = C[Xb] # embed the characters into vectors
emb_cat = emb.view(emb.shape[0], -1) # concatenate the vectors
h_pre_act = emb_cat @ W1 + b1 # hidden layer pre-activation
h = torch.tanh(h_pre_act) # hidden layer
logits = h @ W2 + b2 # output layer
loss = F.cross_entropy(logits, Yb) # loss function
breakfixing the initial loss
We can see at the step = 0, the loss was 27 and after some ks training loops it decreased to 1 or 2. It extremely high at the begining. In practice, we should give the network somehow the expectation we want when generating a character after some characters (3).
In this case, without training yet, we expect all 27 characters’ possibilities to be equal (1 / 27.0) ~ uniform distribution, so the loss ~ negative log likelihood would be:
It’s far lower than 27, we say that the network is confidently wrong. Andrej demonstrated by another simple 5 elements tensor and showed that the loss is lowest when all elements are equal.
We want the logits to be low entropy as possible (but not equal to 0, which will be showed later), we added multipliers 0.01 to W2, and 0 to b2. We got the loss to be 3.xx at the beginning.
Now re-train the model and we will notice the the lossi will not look like the hookey stick anymore! Morever the final loss on train set and dev set is better!
fixing the saturated tanh
The logits are now okay, the next problem is about the h - the activations of the hidden states! It’s hard to see but in the output of code cell below, there are too many values of 1 and -1 in this tensor.
tensor([[-0.9568, -0.0985, -0.9696, ..., -1.0000, 0.9999, 1.0000],
[ 0.9201, 0.7975, -0.9178, ..., 0.9732, -0.8110, 1.0000],
[-1.0000, 0.9893, -0.9832, ..., 0.9573, 0.8989, 1.0000],
...,
[-1.0000, 1.0000, -1.0000, ..., 0.0247, -0.9899, -0.9938],
[ 0.9995, -0.9957, -1.0000, ..., 0.9994, -1.0000, -1.0000],
[ 0.9993, 0.9333, -0.9900, ..., -0.9986, 1.0000, 0.9996]],
grad_fn=<TanhBackward0>)Recall that tanh is activation function that squashing arbitrary numbers to the range [-1:1]. Let’s visualize the distribution of h.
Show the code
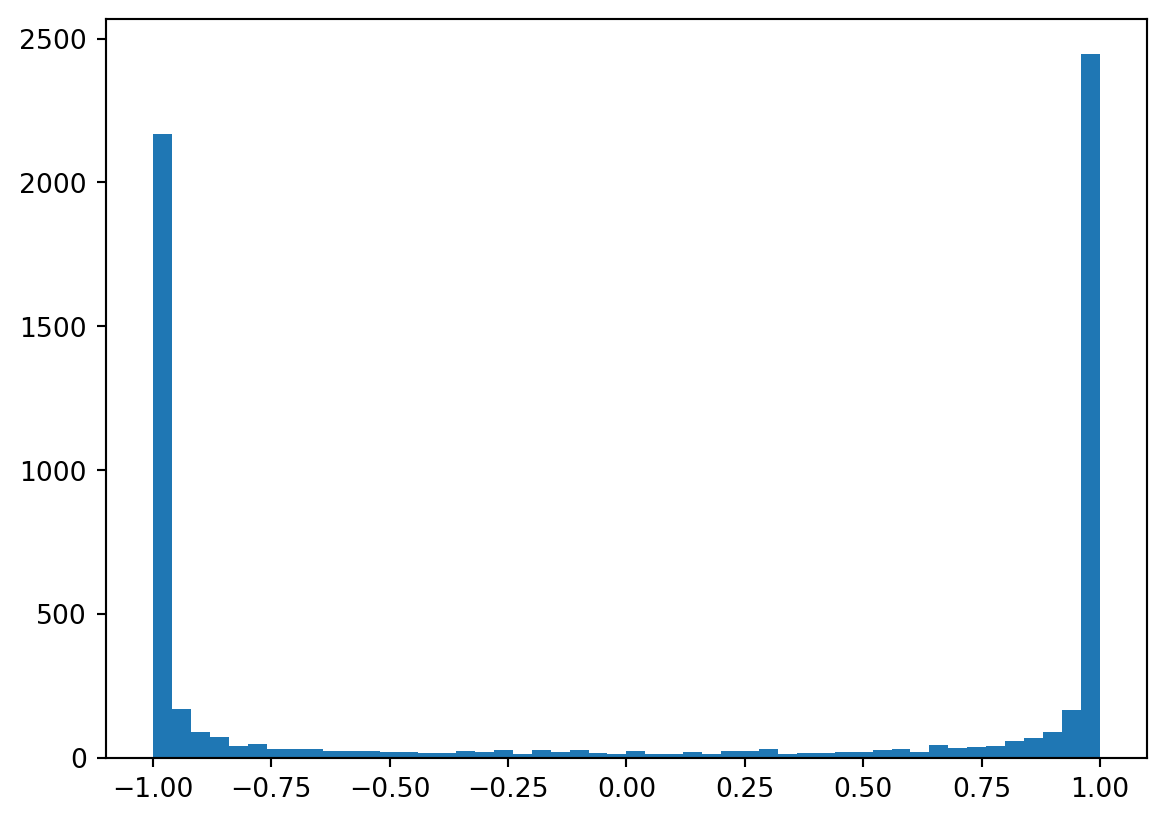
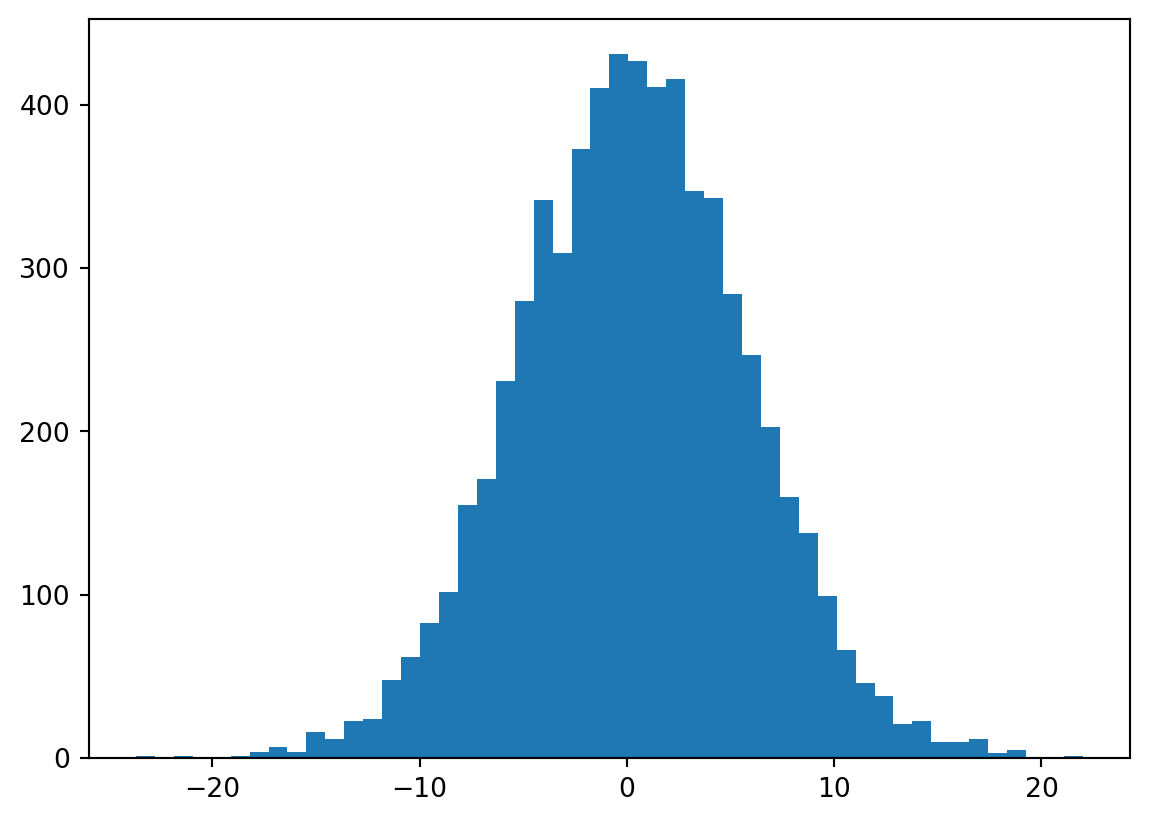
Most of them were distributed to the extreme values -1 and 1. Now come to the h_pre_act, we can see a flat-tails distribution from -15 to 15.
Looking back to how we implemented tanh in micrograd (which is mathematically the same with PyTorch), we’re multiplying the forward node’s gradient with (1 - t**2), which t is local tanh. When tanh is near -1 or 1, this is close to 0, we are killing the gradients. We are stopping the backpropagation through this tanh unit.
When the gradients become zero, the previous nodes’ gradients will be vanishing. We call this saturated tanh, this leads to dead neurons ~ always off and because the gradient is zero then they will never be turned on, and happens for other activations as well: sigmoid, ReLU, etc (but less significant on Leaky ReLU or ELU). The network is not learning!
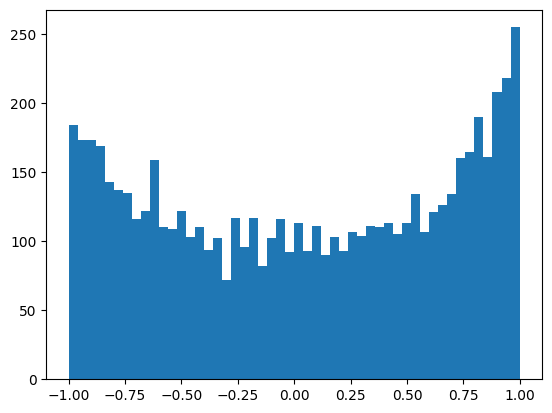
The same with logits, now we want h to be more near zero, we add multipliers to the W1 and b1:
We can see now less peak distribution of h:
tanh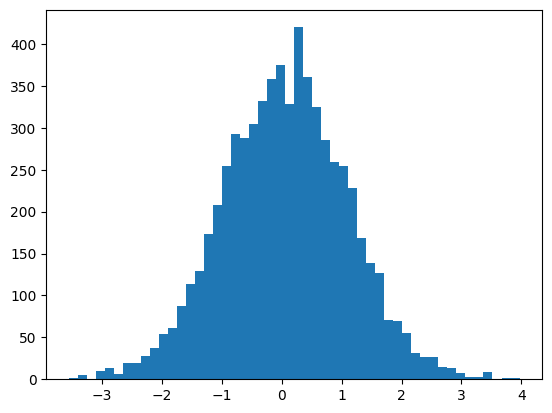
tanhcalculating the init scale: “Kaiming init”
Now let’s look to the number 0.02, in practice no one will set it manually. Let’s look into the example below to see how parameters of Gaussian Distribution of y differ from x when multiplying by W.
The question is how we set the W to preserve the Gaussian Distribution of X. Emperical researches found out that the multiplier to W should be square root of the “fan in”, in this case is 10^0.5.
Show the code
x = torch.randn(1000, 10)
W = torch.randn(10, 200)
y = x @ W
W1 = torch.randn(10, 200) / 10**0.5
y1 = x @ W1
print(x.mean(), x.std())
print(y.mean(), y.std())
print(y1.mean(), y1.std())
plt.figure(figsize=(20,5))
plt.subplot(131).set_title("Input X")
plt.hist(x.view(-1).tolist(), 50, density=True);
plt.subplot(132).set_title("Initial output y, expanded by W")
plt.hist(y.view(-1).tolist(), 50, density=True);
plt.subplot(133).set_title("y1, preserve the X's Gaussian Dist")
plt.hist(y1.view(-1).tolist(), 50, density=True);tensor(0.0075) tensor(0.9942)
tensor(0.0019) tensor(3.2034)
tensor(0.0010) tensor(0.9749)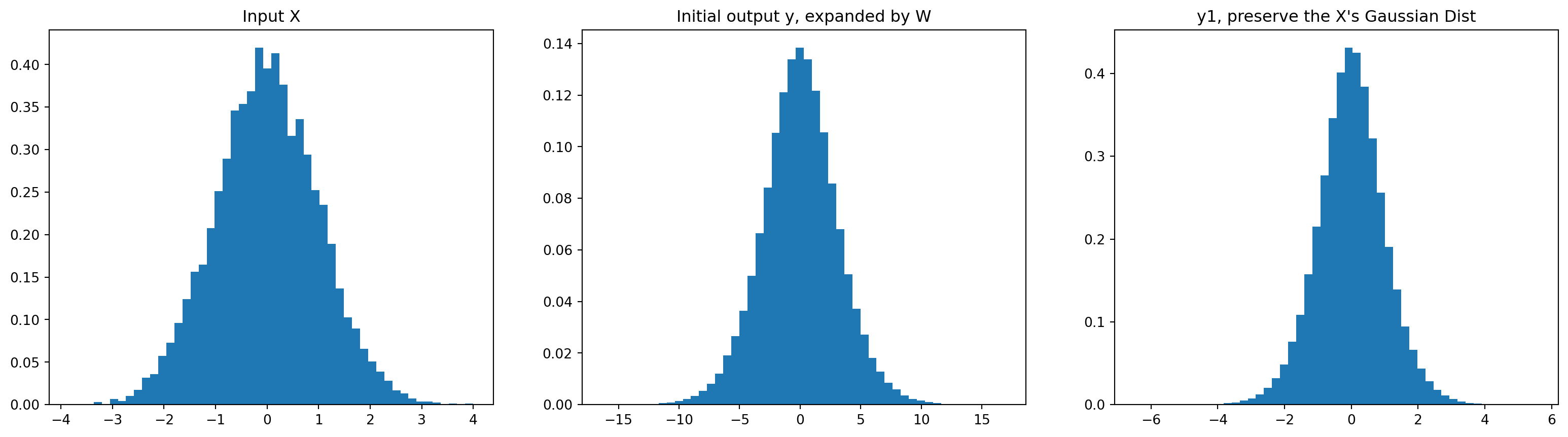
Please investigate more here:
- Kaiming et al. paper: https://arxiv.org/abs/1502.01852
- Implementation in
Pytorch: https://pytorch.org/docs/stable/nn.init.html#torch.nn.init.kaiming_normal_
It’s recommended in Kaiming paper to use a gain multiplier base on nonlinearity/activation function (here), for tanh it’s 5/3. We endup modified the initialization of W1 with:
In this case is roughly 0.3, re-train and although the loss only improved so insignificant (because previously we set it to be 0.2 - very close), but we’ve parameterized this hyper-constant.
batch normalization
As discussed before, we dont want the h_pre_act to be way too small (~is not doing anything) or too large (~saturated), we want it to just roughly follow the standardized Gaussian Distribution (ie. mean equal to 0, std equal to 1).
We’ve done it at the initialization, why don’t we just normalize the hidden states to be unit Gaussian? in batch normalization, this can be achieved by 4 steps, demonstrated with our case:
Show the code
# 1. mini-batch mean
hpa_mean = h_pre_act.mean(0, keepdim=True)
# 2. mini-batch variance / standard deviation
hpa_std = h_pre_act.std(0, keepdim=True)
# 3. normalize
h_pre_act = (h_pre_act - hpa_mean) / hpa_std
# 4. scale and shift
# multiply by a "gain" then "shift" it with a bias
bngain = torch.ones((1, n_hidden))
bnbias = torch.zeros((1, n_hidden))
h_pre_act = bngain * h_pre_act + bnbiasWe modified our code accordingly and re-run the code, actually this time the model did not improve much. Because actually this is very simple and shallow neural network. We also notice that the training loop now is slower than before, because the calculation volumn is bigger. Batch Normalization also unexpectedly comes up with a side effect, the forward and backward pass of any input now also depend on the mini-batch, not just itself (because of mean()/std()). This effect is suprisingly a good thing and acts as a regularizer.
There are also non-coupling regularizers such as: Linear Normalization, Layer Normalization, Group Normalization.
One othering to consider is in the deployment/testing phase, we dont want to use the batch norm calculated by a mini-batch. Instead we want to use the mean and standard deviation from the whole training data set:
Show the code
# calibrate the batch norm after training
with torch.no_grad():
# pass the training set through
emb = C[x_train]
embcat = emb.view(-1, emb.shape[1] * emb.shape[2])
hpreact = embcat @ W1 + b1
# measure the mean/std over the entire training set
bnmean = hpreact.mean(0, keepdim=True)
bnstd = hpreact.std(0, keepdim=True)Rather, we can also use the running mean and standard deviation as implemented below which will give close estimates. Remaining 2 notes on the BN are:
- Dividing zeros: we add a \(\epsilon\) value to the variance to avoid. We do not include this here as it likely not to happen with out example;
- The bias
b1will be subtracting in BN calculation, we will notice theb1.gradwill be zeros as it does not impact any other calculation. Thus when using the BN, for layer before like weight, we should remove the bias. Thebnbiasnow will be incharge for biasing the distributions.
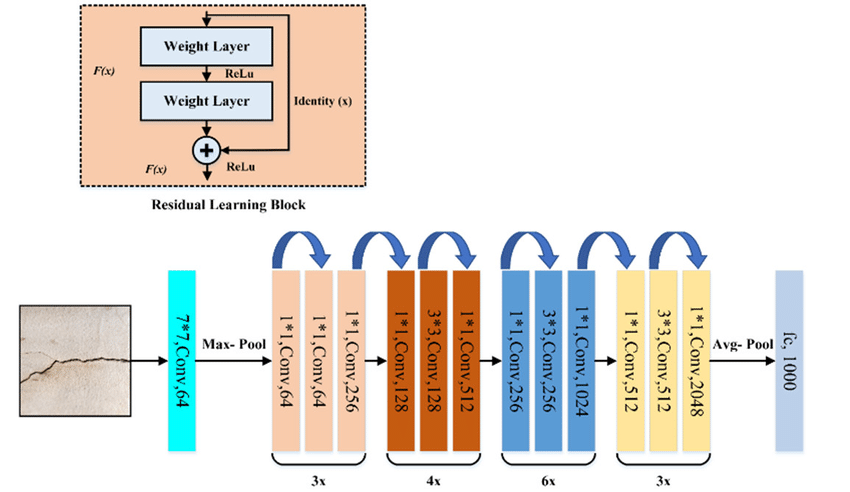
real example: resnet50 walkthrough
The code AK presented here: https://github.com/pytorch/vision/blob/main/torchvision/models/resnet.py#L108
summary of the lecture
Understand the activations (non-linearity) and gradients is crucial when training deep / large neural networks, in part 1 we have observed some issue and come up with many solutions:
- Confidently wrong of network at init leads to hookey stick for loss in training loop: adding multipliers to
logits’s weights and biases; - Flat-tails distribution or saturated
tanh: Kaiming init; - Normalization of the hidden states: introduction to BN.
Our final code in part 1 (un-fold to see), # 👈 indicates a change:
Show the code
block_size = 3
# MLP revisited
n_emb = 10 # no of dimensions of the embedding space.
n_hidden = 200 # size of the hidden - tanh layer
# Lookup table - 10 dimensional space
g = torch.Generator().manual_seed(2147483647) # for reproductivity
C = torch.randn((vocab_size, n_emb), generator=g)
# Layer 1 - tanh - 300 neurons
W1 = torch.randn((block_size * n_emb, n_hidden), generator=g) * (5/3) / ((block_size * n_emb)**0.5) # * 0.2 # 👈
# b1 = torch.randn(n_hidden, generator=g) * 0.01 # 👈
# Layer 2 - softmax
W2 = torch.randn((n_hidden, vocab_size), generator=g) * 0.01 # 👈
b2 = torch.randn(vocab_size, generator=g) * 0 # 👈
# Batch Normalization gain and bias
bngain = torch.ones((1, n_hidden)) # 👈
bnbias = torch.zeros((1, n_hidden)) # 👈
# Add running mean/std
bnmean_running = torch.zeros((1, n_hidden)) # 👈
bnstd_running = torch.ones((1, n_hidden)) # 👈
# All params (deleted b1)
parameters = [C, W1, W2, b2, bngain, bnbias] # 👈
print("No of params: ", sum(p.nelement() for p in parameters))
# Pre-training
for p in parameters:
p.requires_grad = True
# Optimization
max_steps = 5_000 #50_000 #200_000
batch_size = 32
# Stats holders
lossi = []
# Training on Xtr, Ytr
for i in range(max_steps):
# minibatch construct
ix = torch.randint(0, Xtr.shape[0], (batch_size,))
Xb, Yb = Xtr[ix], Ytr[ix] # batch X, Y
# forward pass:
emb = C[Xb] # embed the characters into vectors
emb_cat = emb.view(emb.shape[0], -1) # concatenate the vectors
# Linear layer
h_pre_act = emb_cat @ W1 # + b1 # hidden layer pre-activation # 👈
# BatchNorm layer
bnmeani = h_pre_act.mean(0, keepdim=True) # 👈
bnstdi = h_pre_act.std(0, keepdim=True) # 👈
h_pre_act = bngain * ((h_pre_act - bnmeani) / bnstdi) + bnbias # 👈
# Updating running mean and std (this runs outside the training loop)
with torch.no_grad(): # 👈
bnmean_running = 0.999 * bnmean_running + 0.001 * bnmeani # 👈
bnstd_running = 0.999 * bnstd_running + 0.001 * bnstdi # 👈
# Non-linearity
h = torch.tanh(h_pre_act) # hidden layer
logits = h @ W2 + b2 # output layer
loss = F.cross_entropy(logits, Yb) # loss function
# backward pass:
for p in parameters:
p.grad = None
loss.backward()
# update
lr = 0.1 if i <= max_steps / 2 else 0.01 # step learning rate decay
for p in parameters:
p.data += - lr * p.grad
# track stats
if i % 10000 == 0: # print once every while
print(f'{i:7d}/{max_steps:7d}: {loss.item():.4f}')
lossi.append(loss.log10().item())No of params: 12097
0/ 5000: 3.3170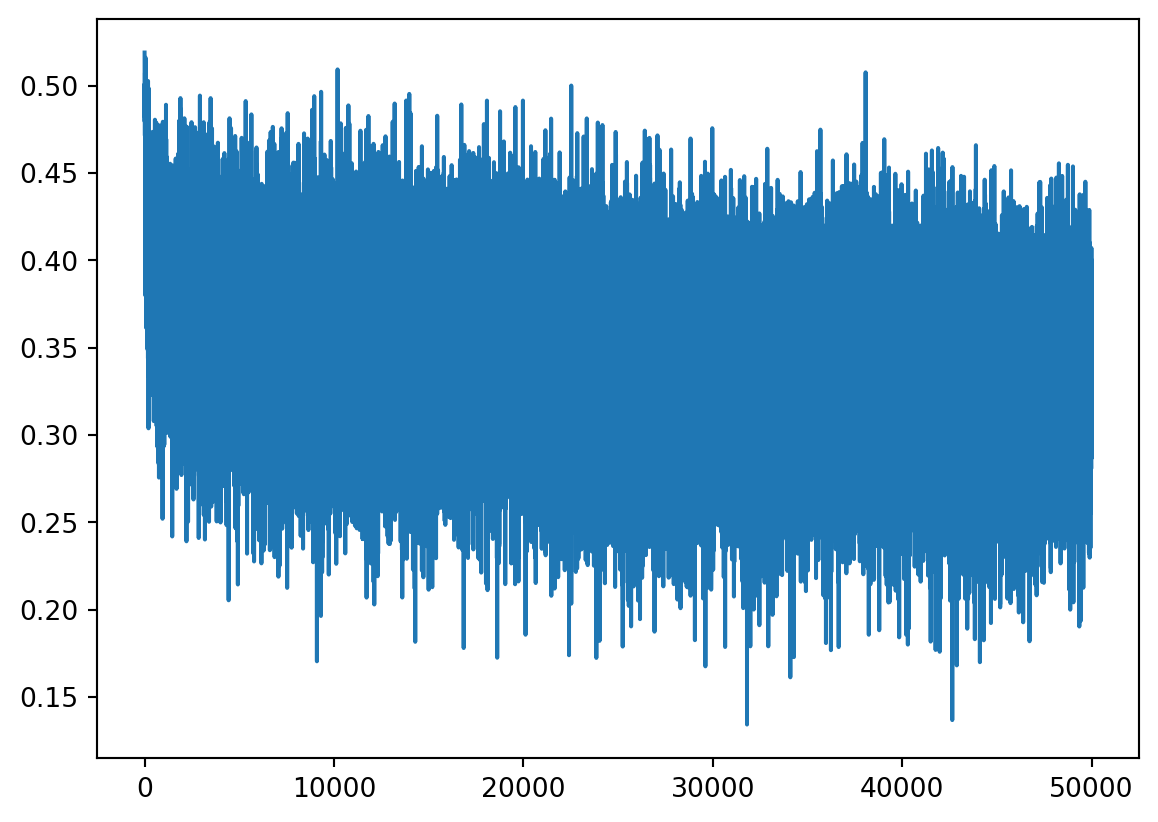
Show the code
@torch.no_grad() # disables gradient tracking
def split_loss(split: str):
x, y = {
'train': (Xtr, Ytr),
'val': (Xdev, Ydev),
'test': (Xte, Yte)
}[split]
emb = C[x]
emb_cat = emb.view(emb.shape[0], -1)
h_pre_act = emb_cat @ W1 + b1 # 👈
# h_pre_act = bngain * ((h_pre_act - h_pre_act.mean(0, keepdim=True)) / h_pre_act.std(0, keepdim=True)) + bnbias # 👈
# h_pre_act = bngain * ((h_pre_act - bnmean) / bnstd) + bnbias # 👈
h_pre_act = bngain * ((h_pre_act - bnmean_running) / bnstd_running) + bnbias # 👈
h = torch.tanh(h_pre_act)
logits = h @ W2 + b2
loss = F.cross_entropy(logits, y)
print(split, loss.item())
split_loss('train')
split_loss('val')train 2.4195921421051025
val 2.422152519226074loss logs
The numbers somehow are approximate, I don’t know why my Thinkpad-E14 gave different results when running codes multiple times 😂.
| Step | What we did | Loss we got (accum) |
|---|---|---|
| 1 | original | train 2.1169614791870117 val 2.1623435020446777 |
| 2 | fixed softmax confidently wrong | train 2.0666463375091553 val 2.1468191146850586 |
| 3 | fixed tanh layer too saturated at init |
train 2.033477544784546 val 2.115907907485962 |
| 4 | used semi principle “kaiming init” instead of hacking init | train 2.038902997970581 val 2.1138899326324463 |
| 5 | added batch norm layer | train 2.0662825107574463 val 2.1201331615448 |
Part 2: PyTorch-ifying the code, and train a deeper network
Below is PyTorch-ified code by Andrej, some comments inputted by me:
Show the code
# Let's train a deeper network
# The classes we create here are the same API as nn.Module in PyTorch
class Linear:
"""
Simplifying Pytorch Linear Layer: https://pytorch.org/docs/stable/generated/torch.nn.Linear.html#torch.nn.Linear
"""
def __init__(self, fan_in, fan_out, bias=True):
self.weight = torch.randn((fan_in, fan_out), generator=g) / fan_in**0.5
self.bias = torch.zeros(fan_out) if bias else None
def __call__(self, x):
self.out = x @ self.weight
if self.bias is not None:
self.out += self.bias
return self.out
def parameters(self):
return [self.weight] + ([] if self.bias is None else [self.bias])
class BatchNorm1d:
"""
Simplifying Pytorch BatchNorm1D: https://pytorch.org/docs/stable/generated/torch.nn.BatchNorm1d.html
"""
def __init__(self, dim, eps=1e-5, momentum=0.1):
self.eps = eps
self.momentum = momentum
self.training = True # to differentiate usage of class in training or evaluation (using running mean/std)
# parameters (trained with backprop)
self.gamma = torch.ones(dim) # gain
self.beta = torch.zeros(dim) # bias
# buffers (trained with a running 'momentum update')
self.running_mean = torch.zeros(dim)
self.running_var = torch.ones(dim)
def __call__(self, x):
# calculate the forward pass
if self.training:
xmean = x.mean(0, keepdim=True) # batch mean
xvar = x.var(0, keepdim=True) # batch variance, follow the paper exactly
else:
xmean = self.running_mean
xvar = self.running_var
xhat = (x - xmean) / torch.sqrt(xvar + self.eps) # normalize to unit variance
self.out = self.gamma * xhat + self.beta # to tracking and visualizing data later on, PyTorch does not have this
# update the buffers
if self.training:
with torch.no_grad():
self.running_mean = (1 - self.momentum) * self.running_mean + self.momentum * xmean
self.running_var = (1 - self.momentum) * self.running_var + self.momentum * xvar
return self.out
def parameters(self):
return [self.gamma, self.beta]
class Tanh:
"""
Just calculate the Tanh, just PyTorch: https://pytorch.org/docs/stable/generated/torch.nn.Tanh.html
"""
def __call__(self, x):
self.out = torch.tanh(x)
return self.out
def parameters(self):
return []
n_embd = 10 # the dimensionality of the character embedding vectors
n_hidden = 100 # the number of neurons in the hidden layer of the MLP
g = torch.Generator().manual_seed(2147483647) # for reproducibility
C = torch.randn((vocab_size, n_embd), generator=g)
layers = [
Linear(n_embd * block_size, n_hidden), Tanh(),
Linear( n_hidden, n_hidden), Tanh(),
Linear( n_hidden, n_hidden), Tanh(),
Linear( n_hidden, n_hidden), Tanh(),
Linear( n_hidden, n_hidden), Tanh(),
Linear( n_hidden, vocab_size),
]
with torch.no_grad():
# last layer: make less confident
layers[-1].weight *= 0.1
# all other layers: apply gain
for layer in layers[:-1]:
if isinstance(layer, Linear):
layer.weight *= 5/3
parameters = [C] + [p for layer in layers for p in layer.parameters()]
print(sum(p.nelement() for p in parameters)) # number of parameters in total
for p in parameters:
p.requires_grad = True46497Show the code
# same optimization as last time
max_steps = 200000
batch_size = 32
lossi = []
ud = []
for i in range(max_steps):
# minibatch construct
ix = torch.randint(0, Xtr.shape[0], (batch_size,), generator=g)
Xb, Yb = Xtr[ix], Ytr[ix] # batch X,Y
# forward pass
emb = C[Xb] # embed the characters into vectors
x = emb.view(emb.shape[0], -1) # concatenate the vectors
for layer in layers:
x = layer(x)
loss = F.cross_entropy(x, Yb) # loss function
# backward pass
for layer in layers:
layer.out.retain_grad() # AFTER_DEBUG: would take out retain_graph
for p in parameters:
p.grad = None
loss.backward()
# update
lr = 0.1 if i < 150000 else 0.01 # step learning rate decay
for p in parameters:
p.data += -lr * p.grad
# track stats
if i % 10000 == 0: # print every once in a while
print(f'{i:7d}/{max_steps:7d}: {loss.item():.4f}')
lossi.append(loss.log10().item())
with torch.no_grad():
ud.append([((lr*p.grad).std() / p.data.std()).log10().item() for p in parameters])
break
# if i >= 1000:
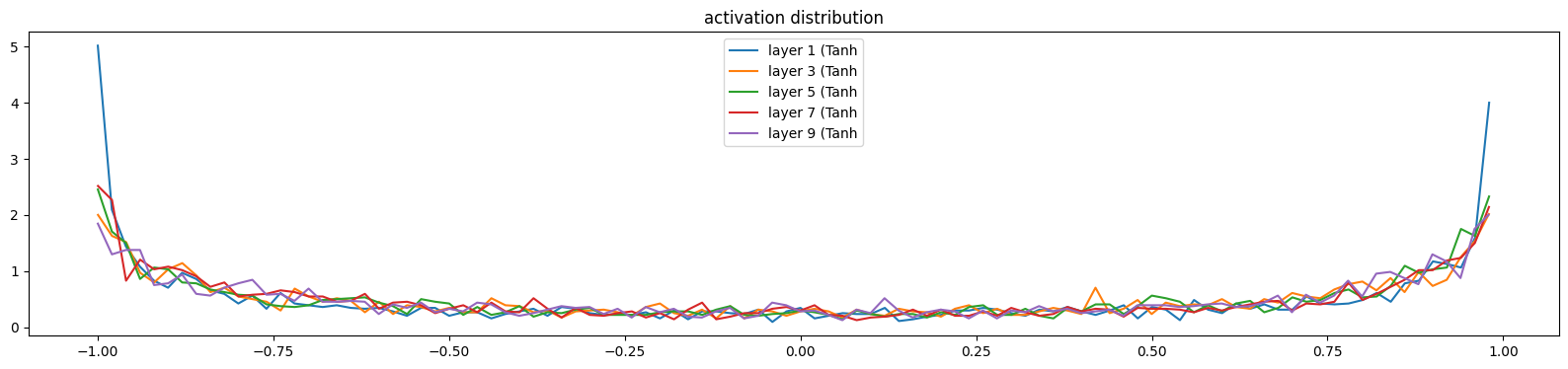
# break # AFTER_DEBUG: would take out obviously to run full optimization 0/ 200000: 3.2962viz #1: forward pass activations statistics
Show the code
# visualize histograms
plt.figure(figsize=(11, 3)) # width and height of the plot
legends = []
for i, layer in enumerate(layers[:-1]): # note: exclude the output layer
if isinstance(layer, Tanh):
t = layer.out
print('layer %d (%10s): mean %+.2f, std %.2f, saturated: %.2f%%' % (i, layer.__class__.__name__, t.mean(), t.std(), (t.abs() > 0.97).float().mean()*100))
hy, hx = torch.histogram(t, density=True)
plt.plot(hx[:-1].detach(), hy.detach())
legends.append(f'layer {i} ({layer.__class__.__name__}')
plt.legend(legends);
plt.title('activation distribution')layer 1 ( Tanh): mean -0.02, std 0.75, saturated: 20.25%
layer 3 ( Tanh): mean -0.00, std 0.69, saturated: 8.38%
layer 5 ( Tanh): mean +0.00, std 0.67, saturated: 6.62%
layer 7 ( Tanh): mean -0.01, std 0.66, saturated: 5.47%
layer 9 ( Tanh): mean -0.02, std 0.66, saturated: 6.12%Text(0.5, 1.0, 'activation distribution')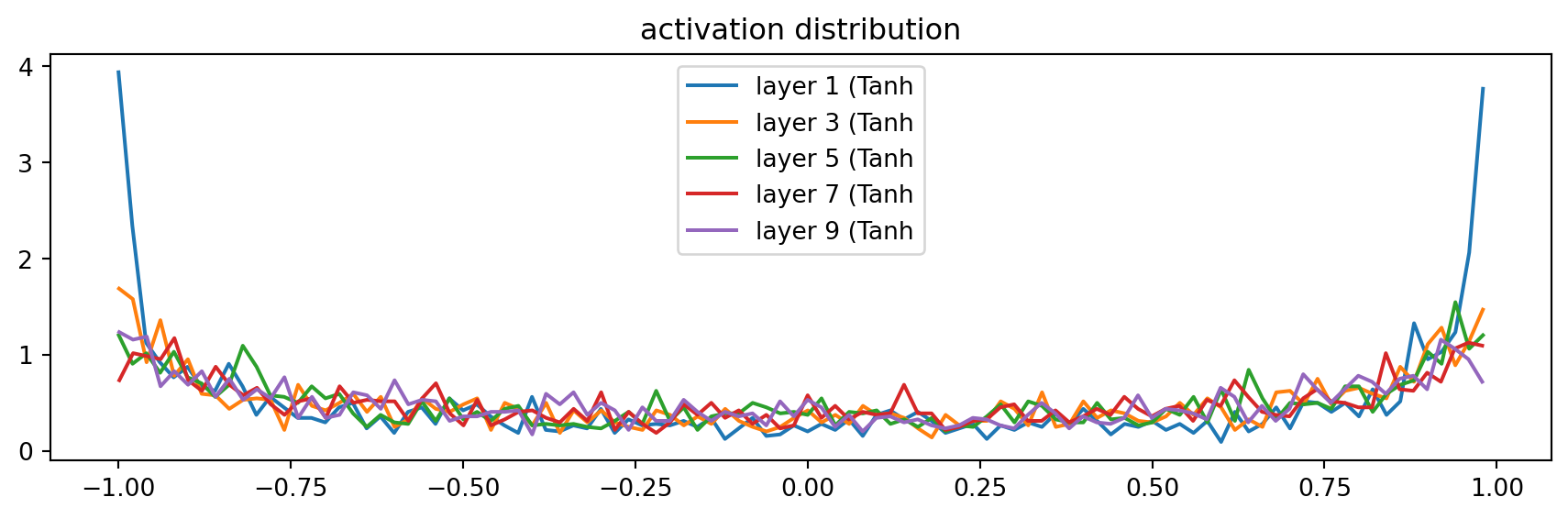
If we set the gain to 1, the std is shrinking, and the saturation is coming to zeros, due to the first layer is pretty decent, but the next ones are shrinking to zero because of the tanh() - a squashing function.
layer 1 ( Tanh): mean -0.02, std 0.62, saturated: 3.50%
layer 3 ( Tanh): mean -0.00, std 0.48, saturated: 0.03%
layer 5 ( Tanh): mean +0.00, std 0.41, saturated: 0.06%
layer 7 ( Tanh): mean +0.00, std 0.35, saturated: 0.00%
layer 9 ( Tanh): mean -0.02, std 0.32, saturated: 0.00%
Text(0.5, 1.0, 'activation distribution')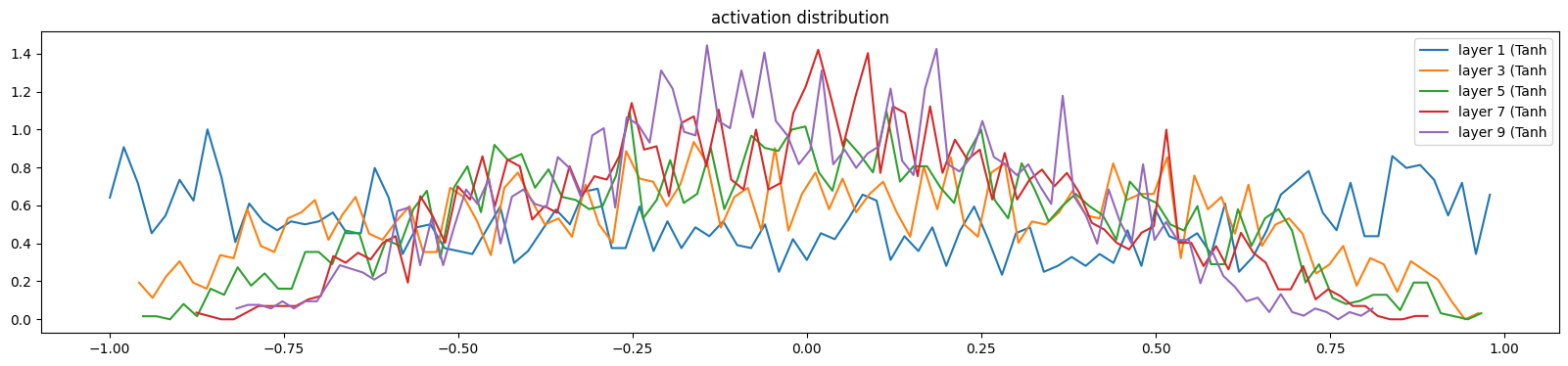
But if we set the gain is far too high, let’s say 3, we can see the saturation is too high.
layer 1 ( Tanh): mean -0.03, std 0.85, saturated: 47.66%
layer 3 ( Tanh): mean +0.00, std 0.84, saturated: 40.47%
layer 5 ( Tanh): mean -0.01, std 0.84, saturated: 42.38%
layer 7 ( Tanh): mean -0.01, std 0.84, saturated: 42.00%
layer 9 ( Tanh): mean -0.03, std 0.84, saturated: 42.41%
Text(0.5, 1.0, 'activation distribution')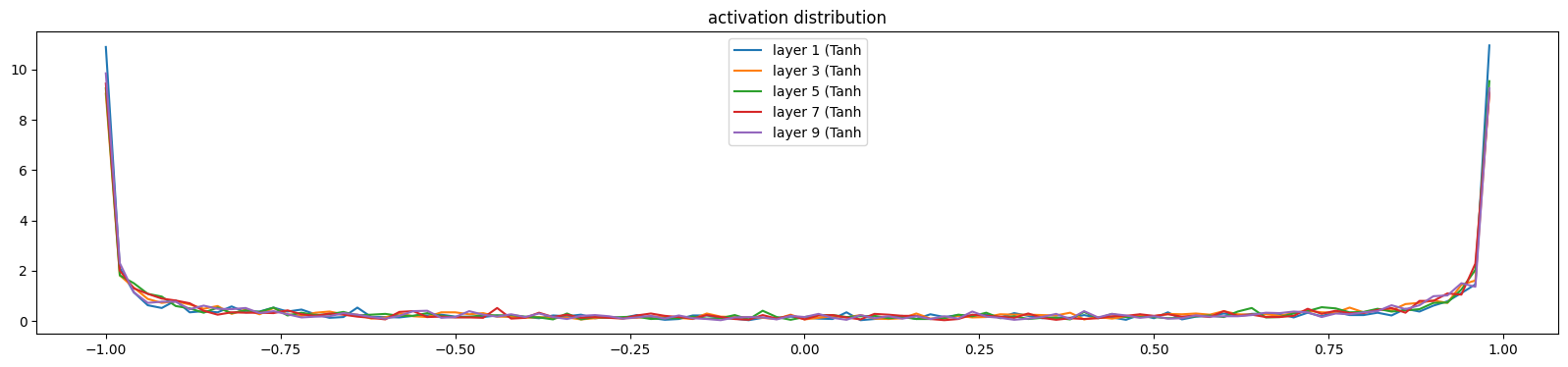
So 5/3 is a nice one, balancing the std and saturation.
A comment in his video explains why 5/3 is recommended, it comes from the avg of \([\tanh(x)]^2\) where \(x\) is distributed as a Gaussian:
\(\int_{-\infty}^{\infty} \frac{[\tanh(x)]^2 \exp(-\frac{x^2}{2})}{\sqrt{2\pi}} \, dx \approx 0.39\)
The square root of this value is how much the
tanhsqueezes the variance of the incoming variable: 0.39 ** .5 ~= 0.63 ~= 3/5 (hence 5/3 is just an approximation of the exact gain).
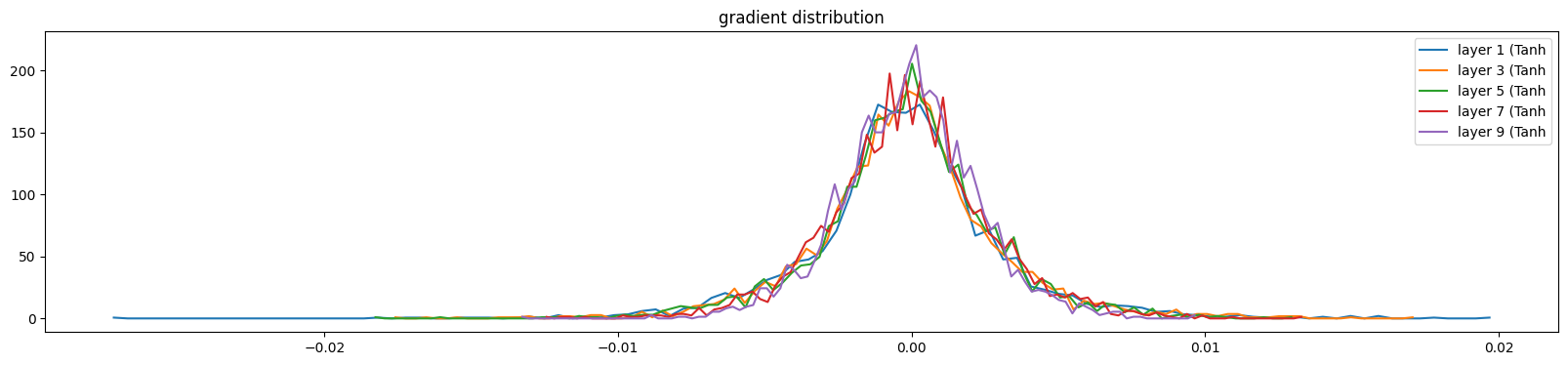
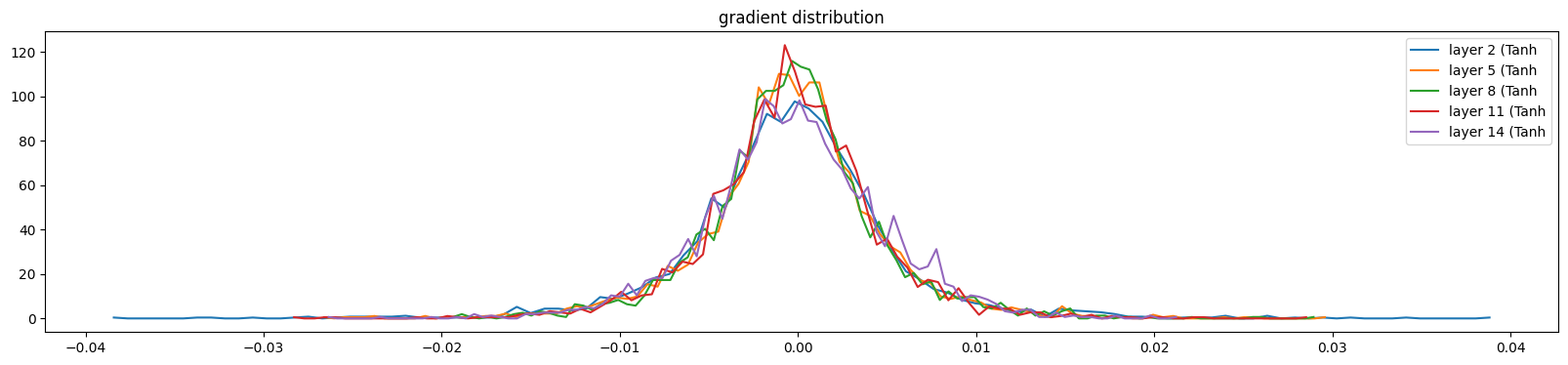
viz #2: backward pass gradient statistics
Similarly, we can do the same thing with gradients. With the setting of gain as 5/3, the distribution of gradients through layers quite the same. Layer by layer, the value of gradients will be shrank close to zero, the distributions would be more and more peak, so the gain here will help expanding those distributions.
Show the code
# visualize histograms
plt.figure(figsize=(11, 3)) # width and height of the plot
legends = []
for i, layer in enumerate(layers[:-1]): # note: exclude the output layer
if isinstance(layer, Tanh):
t = layer.out.grad
print('layer %d (%10s): mean %+f, std %e' % (i, layer.__class__.__name__, t.mean(), t.std()))
hy, hx = torch.histogram(t, density=True)
plt.plot(hx[:-1].detach(), hy.detach())
legends.append(f'layer {i} ({layer.__class__.__name__}')
plt.legend(legends);
plt.title('gradient distribution')layer 1 ( Tanh): mean +0.000010, std 4.205588e-04
layer 3 ( Tanh): mean -0.000003, std 3.991179e-04
layer 5 ( Tanh): mean +0.000003, std 3.743020e-04
layer 7 ( Tanh): mean +0.000015, std 3.290473e-04
layer 9 ( Tanh): mean -0.000014, std 3.054035e-04Text(0.5, 1.0, 'gradient distribution')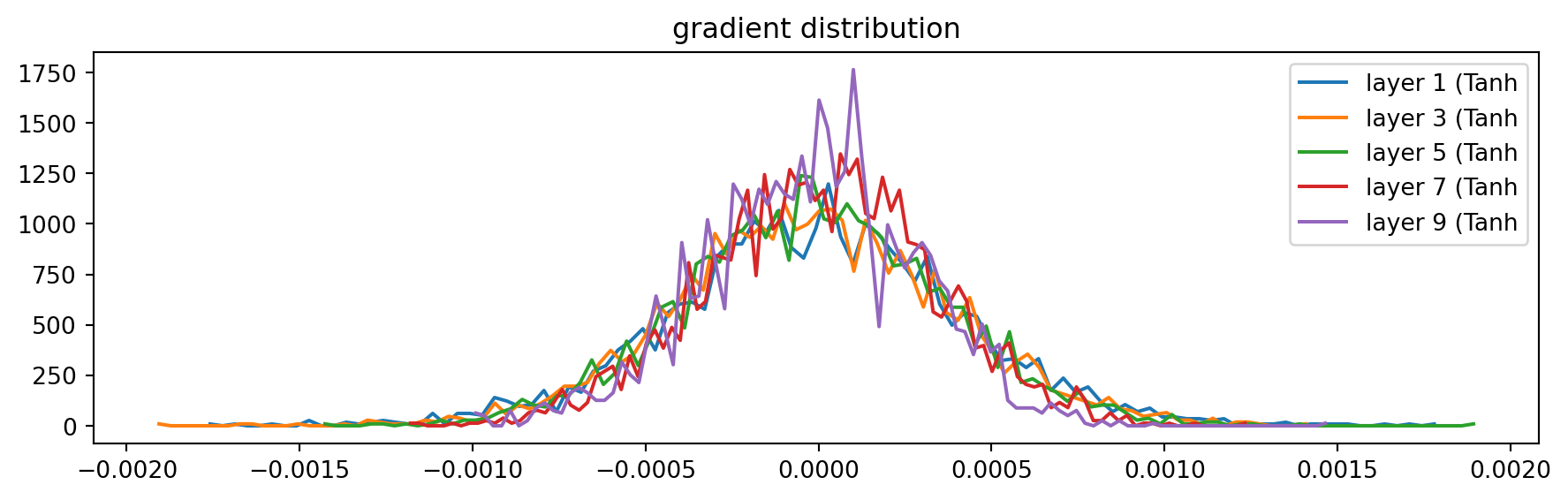
the fully linear case of no non-linearity
Now imagine if we remove the tanh from all layers, the recommend gain now for Linear is 1.
But you’ll end up getting a pure linear network. No matter of how many Linear Layers you stacked up, it just the combination of all layers to a massive linear function \(y = xA^T + b\), which will greatly limit the capacity of the neural nets.
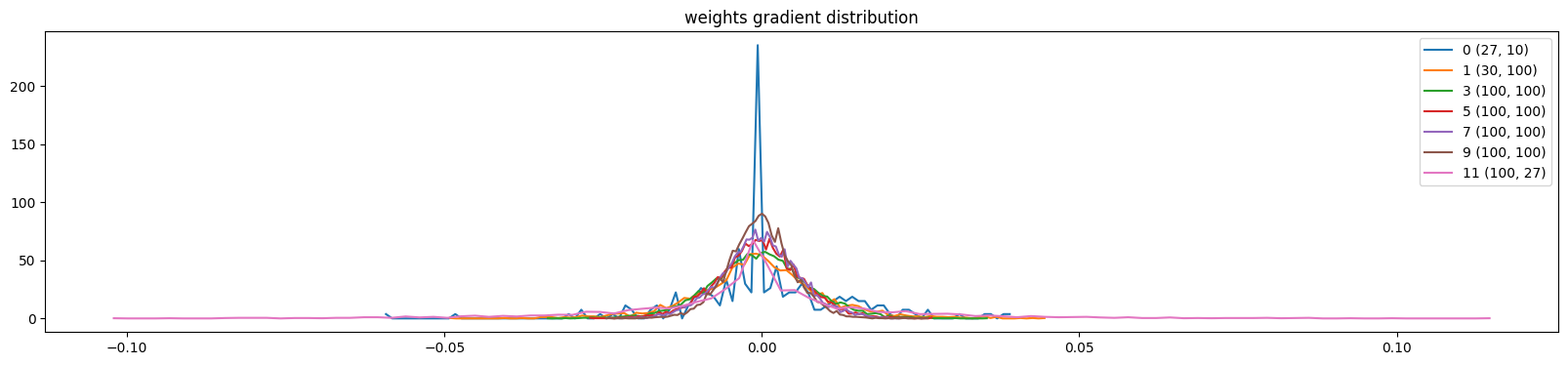
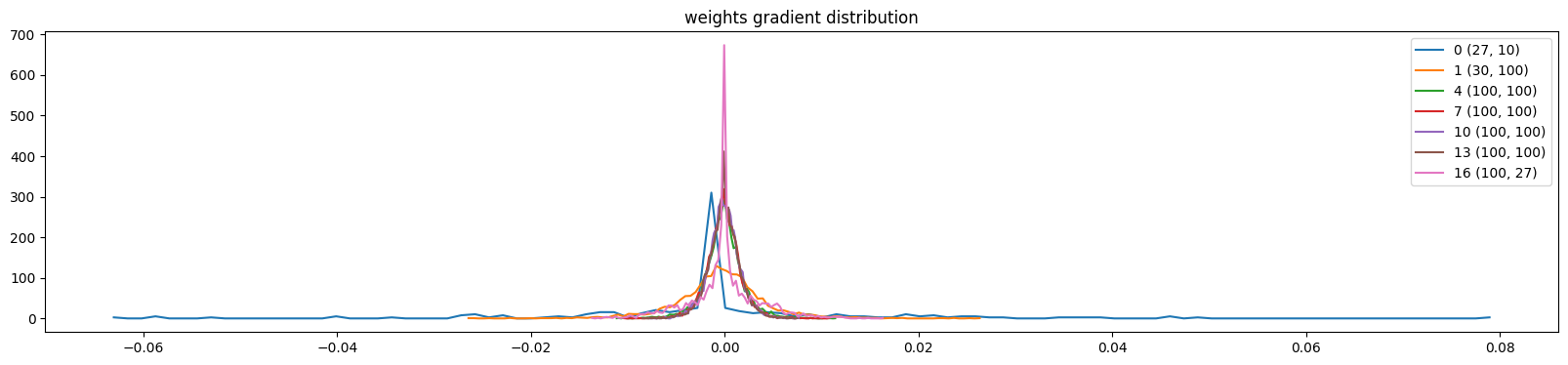
viz #3: parameter activation and gradient statistics
We can also visualize the distribution of paramaters, here below only weight for simplicity (ignoring gamma, beta, etc…). We observed mean, std, and the grad to data ratio (to see how much the data will be updated).
Problem for the last layer is shown in code output below, the weights on last layer are 10 times bigger than previous ones, and the grad to data ratio is too high.
We can try run 1st 1000 training loops and this can be slight reduced, but since we are using a simple optimizer SGD rather than modern one like Adam, it is still problematic.
Show the code
# visualize histograms
plt.figure(figsize=(11, 3)) # width and height of the plot
legends = []
for i,p in enumerate(parameters):
t = p.grad
if p.ndim == 2:
print('weight %10s | mean %+f | std %e | grad:data ratio %e' % (tuple(p.shape), t.mean(), t.std(), t.std() / p.std()))
hy, hx = torch.histogram(t, density=True)
plt.plot(hx[:-1].detach(), hy.detach())
legends.append(f'{i} {tuple(p.shape)}')
plt.legend(legends)
plt.title('weights gradient distribution');weight (27, 10) | mean -0.000031 | std 1.365078e-03 | grad:data ratio 1.364090e-03
weight (30, 100) | mean -0.000049 | std 1.207430e-03 | grad:data ratio 3.871660e-03
weight (100, 100) | mean +0.000016 | std 1.096730e-03 | grad:data ratio 6.601988e-03
weight (100, 100) | mean -0.000010 | std 9.893572e-04 | grad:data ratio 5.893091e-03
weight (100, 100) | mean -0.000011 | std 8.623432e-04 | grad:data ratio 5.158123e-03
weight (100, 100) | mean -0.000004 | std 7.388576e-04 | grad:data ratio 4.415211e-03
weight (100, 27) | mean -0.000000 | std 2.364824e-02 | grad:data ratio 2.328203e+00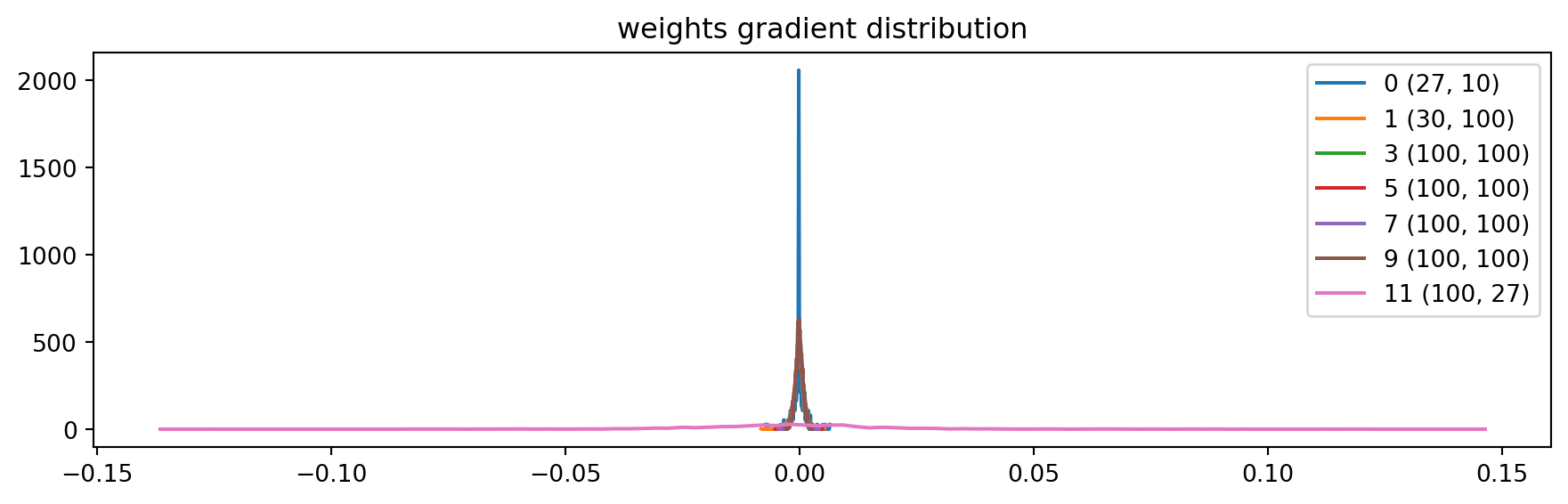
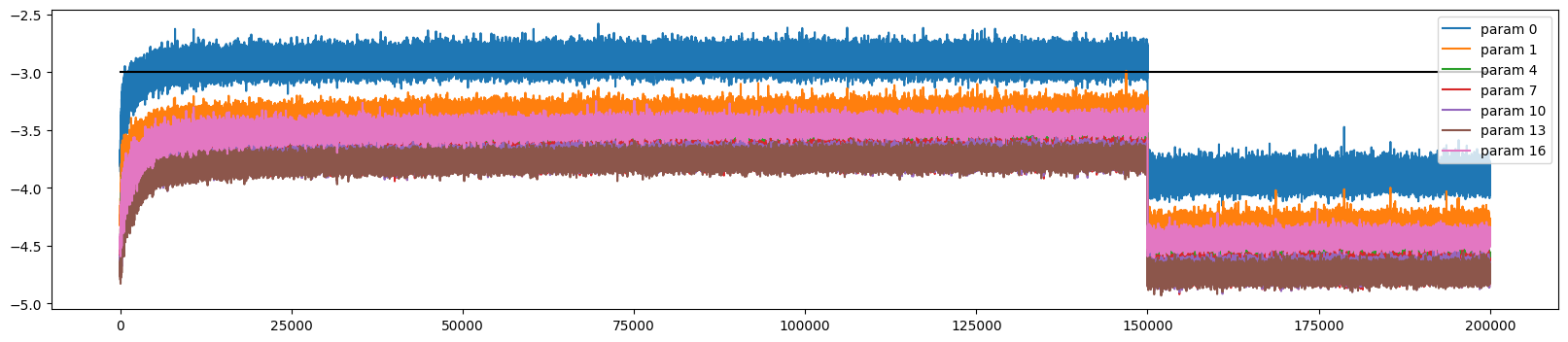
viz #4: update data ratio over time
The grad to data above ratio is at the end not really informative (only at one point in time), what matter is actual amount which we change the data in these tensors (over time). AK introduce a tracking list ud (update to data). This calculates the ratio between (std) of the grad to the data of parameters (and log10() for a nicer viz) without context of gradient.
Below is the visualization from data collected after 1000 training loops:
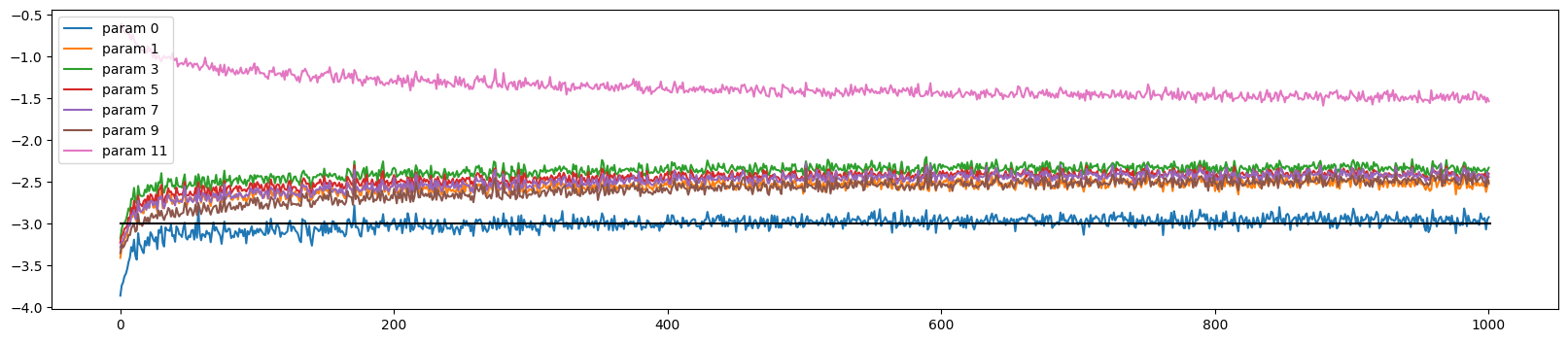
Recall what we did to the last layer, avoiding over confidence, so the pink line looks different among others. In general, the learning process are good, if we change the learning rate to 0.0001, the chart looks much worse.
Below are viz 1 after 1000 training loops:
and viz 2:
and viz 3:
Pretty decent till now. Let’s bring the BatchNorm back.
bringing back batch norm, looking at the visualizations
We re-define the layers, and change gamma in last layer under no gradient instead of weight. We also dont want the “manual normalization” fan-in, and the gain 5/3 as well:
Show the code
layers = [
Linear(n_embd * block_size, n_hidden, bias=False), BatchNorm1d(n_hidden), Tanh(),
Linear( n_hidden, n_hidden, bias=False), BatchNorm1d(n_hidden), Tanh(),
Linear( n_hidden, n_hidden, bias=False), BatchNorm1d(n_hidden), Tanh(),
Linear( n_hidden, n_hidden, bias=False), BatchNorm1d(n_hidden), Tanh(),
Linear( n_hidden, n_hidden, bias=False), BatchNorm1d(n_hidden), Tanh(),
Linear( n_hidden, vocab_size, bias=False), BatchNorm1d(vocab_size),
]summary of the lecture for real this time
- Intruduction of Batch Normalization - the 1st one of modern innovation to stablize Deep NN training;
- PyTorch-ifying code;
- Introduction to some diagnostic tools that we can use to verify the network is in good state dynamically.
What he did not try to improve here is the loss of the network. It’s now somehow bottleneck not by the Optimization, but by the Context Length he suspect.
Training Neural Network is like balancing a pencil on a finger.
Final network architecture and training:
Show the code
# BatchNorm1D and Tanh are the same
class Linear:
"""
Simplifying Pytorch Linear Layer: https://pytorch.org/docs/stable/generated/torch.nn.Linear.html#torch.nn.Linear
"""
def __init__(self, fan_in, fan_out, bias=True):
self.weight = torch.randn((fan_in, fan_out), generator=g) # / fan_in**0.5
self.bias = torch.zeros(fan_out) if bias else None
def __call__(self, x):
self.out = x @ self.weight
if self.bias is not None:
self.out += self.bias
return self.out
def parameters(self):
return [self.weight] + ([] if self.bias is None else [self.bias])
n_embd = 10 # the dimensionality of the character embedding vectors
n_hidden = 100 # the number of neurons in the hidden layer of the MLP
g = torch.Generator().manual_seed(2147483647) # for reproducibility
C = torch.randn((vocab_size, n_embd), generator=g)
layers = [
Linear(n_embd * block_size, n_hidden, bias=False), BatchNorm1d(n_hidden), Tanh(),
Linear( n_hidden, n_hidden, bias=False), BatchNorm1d(n_hidden), Tanh(),
Linear( n_hidden, n_hidden, bias=False), BatchNorm1d(n_hidden), Tanh(),
Linear( n_hidden, n_hidden, bias=False), BatchNorm1d(n_hidden), Tanh(),
Linear( n_hidden, n_hidden, bias=False), BatchNorm1d(n_hidden), Tanh(),
Linear( n_hidden, vocab_size, bias=False), BatchNorm1d(vocab_size),
]
with torch.no_grad():
# last layer: make less confident
layers[-1].gamma *= 0.1
# all other layers: apply gain
for layer in layers[:-1]:
if isinstance(layer, Linear):
layer.weight *= 1.0 #5/3
parameters = [C] + [p for layer in layers for p in layer.parameters()]
print(sum(p.nelement() for p in parameters)) # number of parameters in total
for p in parameters:
p.requires_grad = True
# same optimization as last time
max_steps = 5_000 #200_000
batch_size = 32
lossi = []
ud = []
for i in range(max_steps):
# minibatch construct
ix = torch.randint(0, Xtr.shape[0], (batch_size,), generator=g)
Xb, Yb = Xtr[ix], Ytr[ix] # batch X,Y
# forward pass
emb = C[Xb] # embed the characters into vectors
x = emb.view(emb.shape[0], -1) # concatenate the vectors
for layer in layers:
x = layer(x)
loss = F.cross_entropy(x, Yb) # loss function
# backward pass
for layer in layers:
layer.out.retain_grad() # AFTER_DEBUG: would take out retain_graph
for p in parameters:
p.grad = None
loss.backward()
# update
lr = 0.1 if i < 150000 else 0.01 # step learning rate decay
for p in parameters:
p.data += -lr * p.grad
# track stats
if i % 10000 == 0: # print every once in a while
print(f'{i:7d}/{max_steps:7d}: {loss.item():.4f}')
lossi.append(loss.log10().item())
with torch.no_grad():
ud.append([((lr*p.grad).std() / p.data.std()).log10().item() for p in parameters])
# break
# if i >= 1000:
# break # AFTER_DEBUG: would take out obviously to run full optimization47024
0/ 5000: 3.2870Final visualization:
Viz 1:

Viz 2:
Viz 3:
Viz 4:
The final loss on train/val:
Show the code
@torch.no_grad() # this decorator disables gradient tracking
def split_loss(split):
x,y = {
'train': (Xtr, Ytr),
'val': (Xdev, Ydev),
'test': (Xte, Yte),
}[split]
emb = C[x] # (N, block_size, n_embd)
x = emb.view(emb.shape[0], -1) # concat into (N, block_size * n_embd)
for layer in layers:
x = layer(x)
loss = F.cross_entropy(x, y)
print(split, loss.item())
# put layers into eval mode
for layer in layers:
layer.training = False
split_loss('train')
split_loss('val')train 2.4574997425079346
val 2.453139066696167Sample from the model:
Show the code
# sample from the model
g = torch.Generator().manual_seed(2147483647 + 10)
for _ in range(20):
out = []
context = [0] * block_size # initialize with all ...
while True:
# forward pass the neural net
emb = C[torch.tensor([context])] # (1,block_size,n_embd)
x = emb.view(emb.shape[0], -1) # concatenate the vectors
for layer in layers:
x = layer(x)
logits = x
probs = F.softmax(logits, dim=1)
# sample from the distribution
ix = torch.multinomial(probs, num_samples=1, generator=g).item()
# shift the context window and track the samples
context = context[1:] + [ix]
out.append(ix)
# if we sample the special '.' token, break
if ix == 0:
break
print(''.join(itos[i] for i in out)) # decode and print the generated worderia.
kmyanliee.
mad.
ryal.
rethasiendrlen.
adered.
elii.
emy.
jearekenneananareelyniohlkaann.
shdbvrgnhi.
jest.
jair.
jelelxnthaoriu.
maycdariylyne.
ehs.
kaejahsanyah.
hal.
salyansuh.
zajelvau.
ere.Happy learning!
Exercises:
- E01: I did not get around to seeing what happens when you initialize all weights and biases to zero. Try this and train the neural net. You might think either that 1) the network trains just fine or 2) the network doesn’t train at all, but actually it is 3) the network trains but only partially, and achieves a pretty bad final performance. Inspect the gradients and activations to figure out what is happening and why the network is only partially training, and what part is being trained exactly.
- E02: BatchNorm, unlike other normalization layers like LayerNorm/GroupNorm etc. has the big advantage that after training, the batchnorm gamma/beta can be “folded into” the weights of the preceeding Linear layers, effectively erasing the need to forward it at test time. Set up a small 3-layer MLP with batchnorms, train the network, then “fold” the batchnorm gamma/beta into the preceeding Linear layer’s W,b by creating a new W2, b2 and erasing the batch norm. Verify that this gives the same forward pass during inference. i.e. we see that the batchnorm is there just for stabilizing the training, and can be thrown out after training is done! pretty cool.
resources:
- other people learn from AK like me: https://bedirtapkan.com/posts/blog_posts/karpathy_3_makemore_activations/; https://skeptric.com/index.html#category=makemore - a replicate (?) with more OOPs on another dataset;
- some good papers recommended by Andrej:
- “Kaiming init” paper: https://arxiv.org/abs/1502.01852;
- BatchNorm paper: https://arxiv.org/abs/1502.03167;
- Bengio et al. 2003 MLP language model paper (pdf): https://www.jmlr.org/papers/volume3/bengio03a/bengio03a.pdf;
- Good paper illustrating some of the problems with batchnorm in practice: https://arxiv.org/abs/2105.07576.
- Notebook: https://github.com/karpathy/nn-zero-to-hero/blob/master/lectures/makemore/makemore_part3_bn.ipynb